HALCONбЇЯАжЎТУ(Цп)
ЮФеТФПТМ
1ЁЂMFCгыHalconЛьКЯБрГЬ
????СїГЬШчЯТ:
????????ЂйЁЂДДНЈMFCЙЄГЬ(Лљгкvs2017):
????????ЂкЁЂВтЪддЫааMFCЙЄГЬ:
????????в§ЗЂвЛИівьГЃ,МгЖЯЕудЫааВщПДЮЪЬтЫљдк
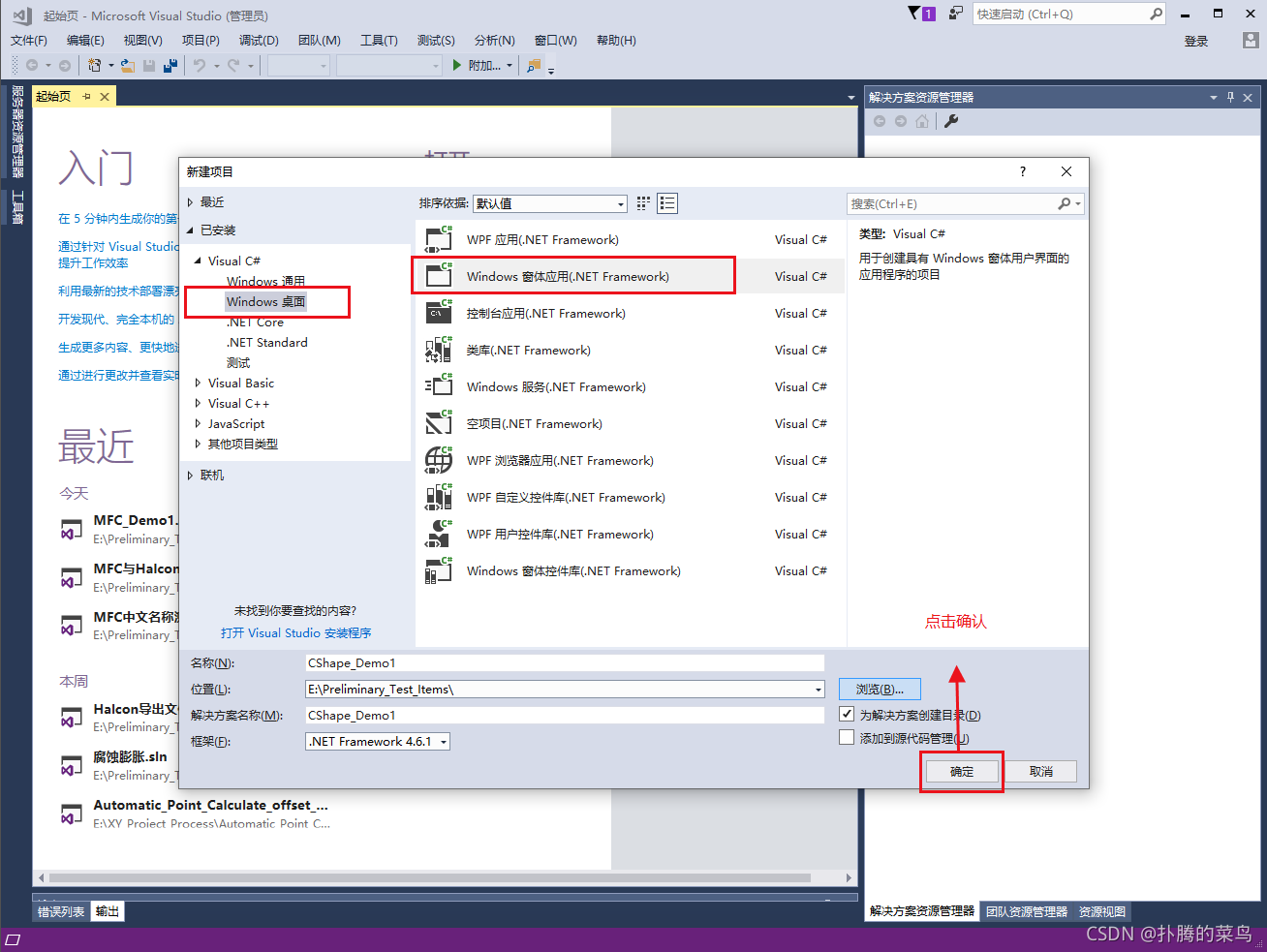
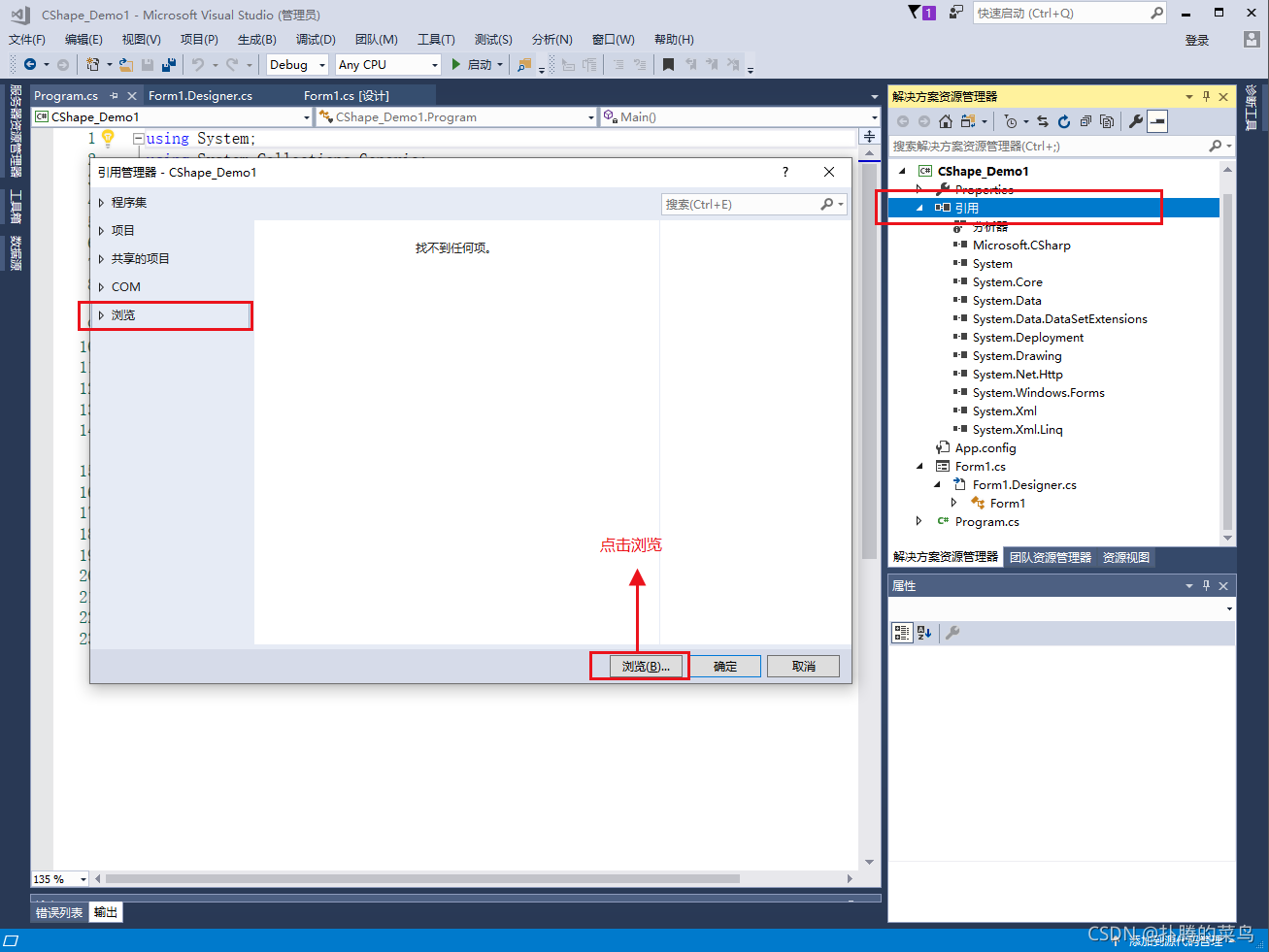
????????ИљОнЭјЩЯНЬГЬаоИФ,ДђПЊЗНЪНЮЊ:ЁАЙЄОпЁБ->ЁАбЁЯюЁБ->ЁАЕїЪдЁБ->ЁАЗћКХЁБ,бЁжа"MicrosoftЗћКХЗўЮёЦї"МДПЩЁЃ
????????дЫааМгдиКмГЄвЛЖЮЪБМф,ШдШЛУЛМгдиЭъЁЃгкЪЧЮвЯыЪЧВЛЪЧвђЮЊЮвЕФЯюФПУћГЦЪЧжаЮФЕМжТЕФЁЃгкЪЧЮвжиаТДДНЈСЫвЛИіЯюФП:
????????ИФГЩгЂЮФЯюФПУћГЦКѓдЫааГЩЙІ(КѓУцЮвгжВтЪдСЫвЛИіжаЮФДДНЈЕФЯюФП,БЈвдЩЯЯрЭЌЕФДэЮѓ,ЫљвддкДЫЬсабвЛЯТ,ОЁСПЪЙгУгЂЮФДДНЈЯюФП)ЁЃ
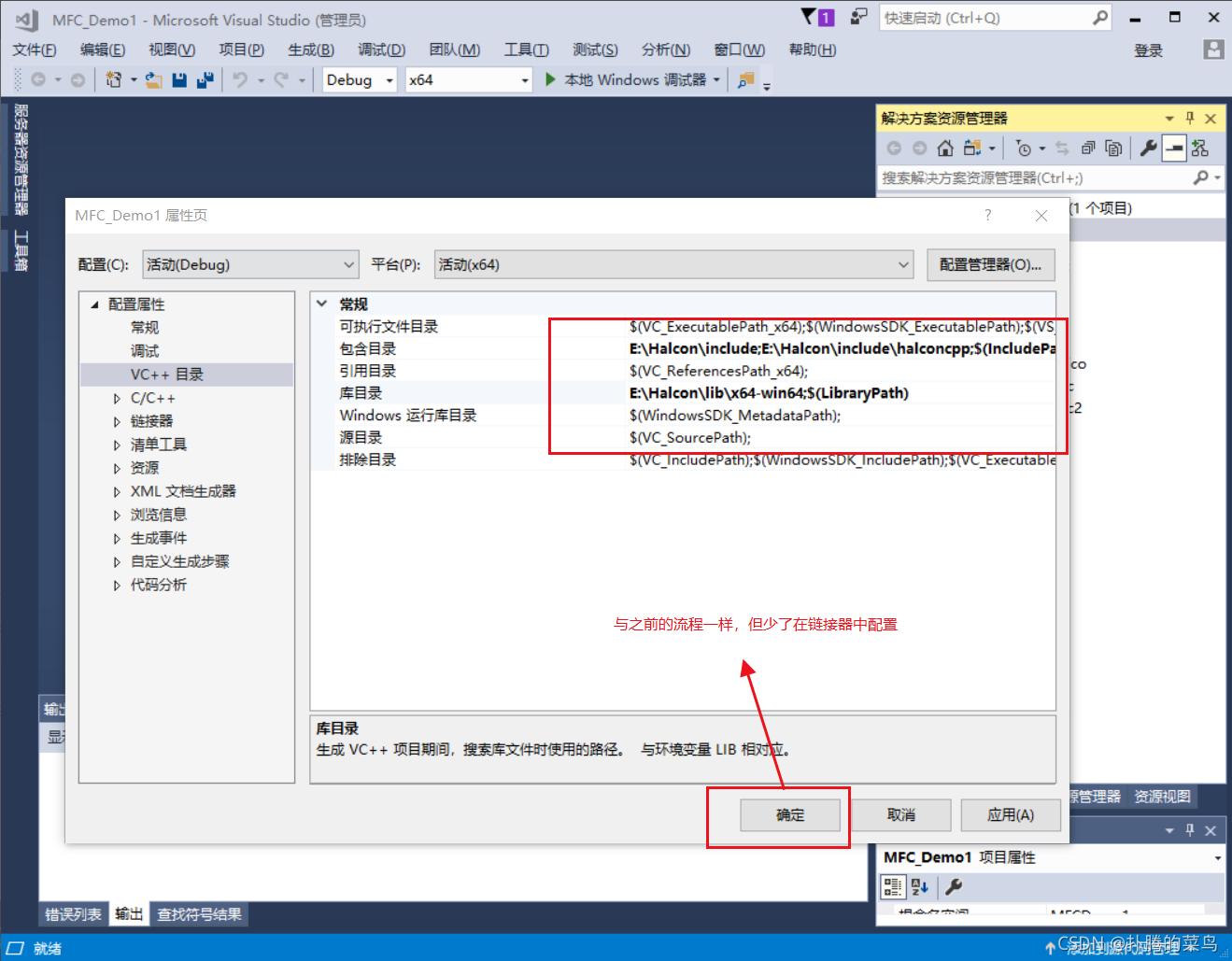
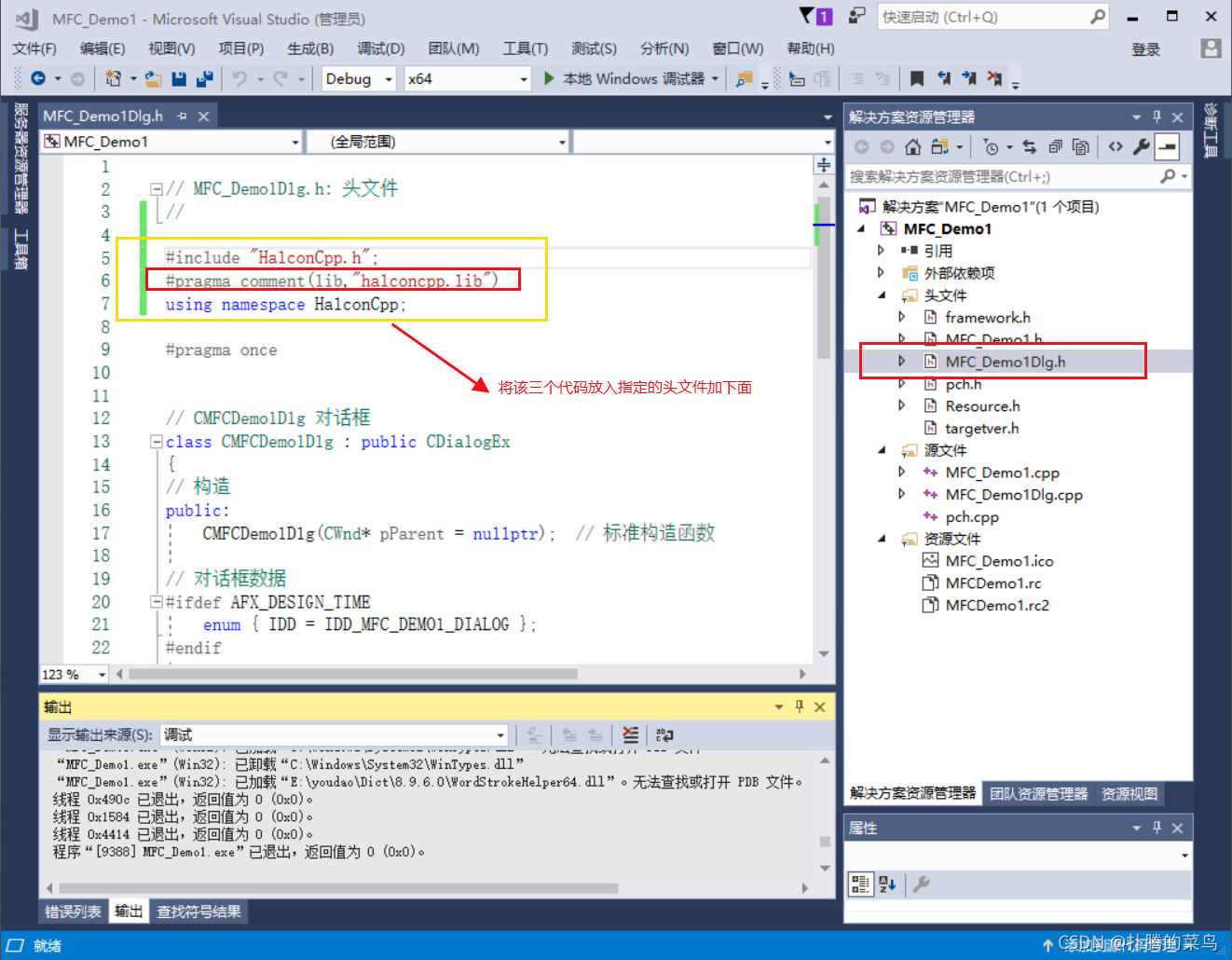
????????ЂлЁЂХфжУHalconЛЗОГ(дкHALCONбЇЯАжЎТУ(Сљ))жавбИјГіХфжУЗНЗЈ,дкДЫ,дйМгвЛжжВЛЭЌХфжУЗНЪН:
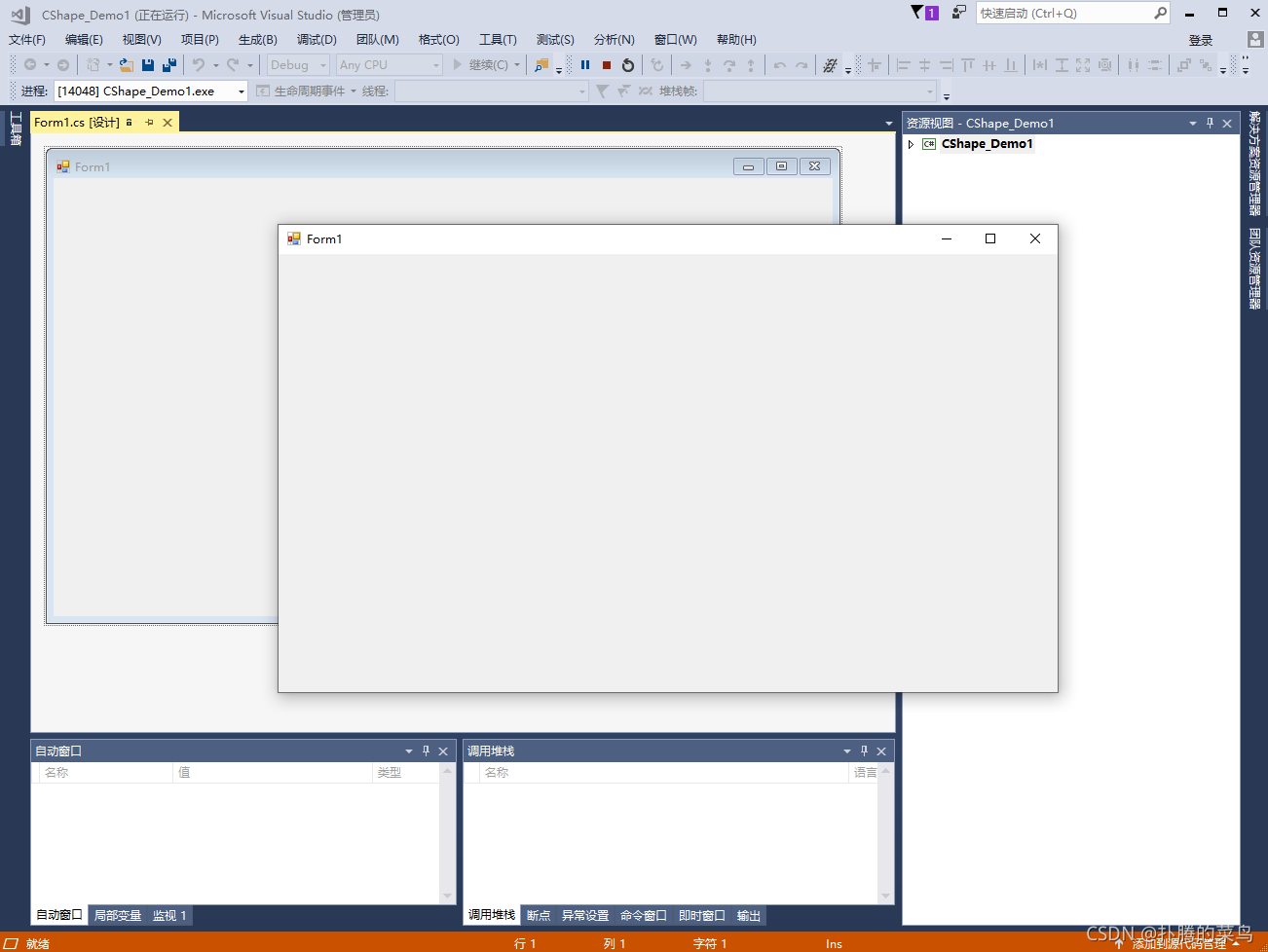
????????ЂмЁЂMFCгыHalconБрГЬ
????????ЂнЁЂаЇЙћеЙЪО
????ДњТыЪЕЯж:
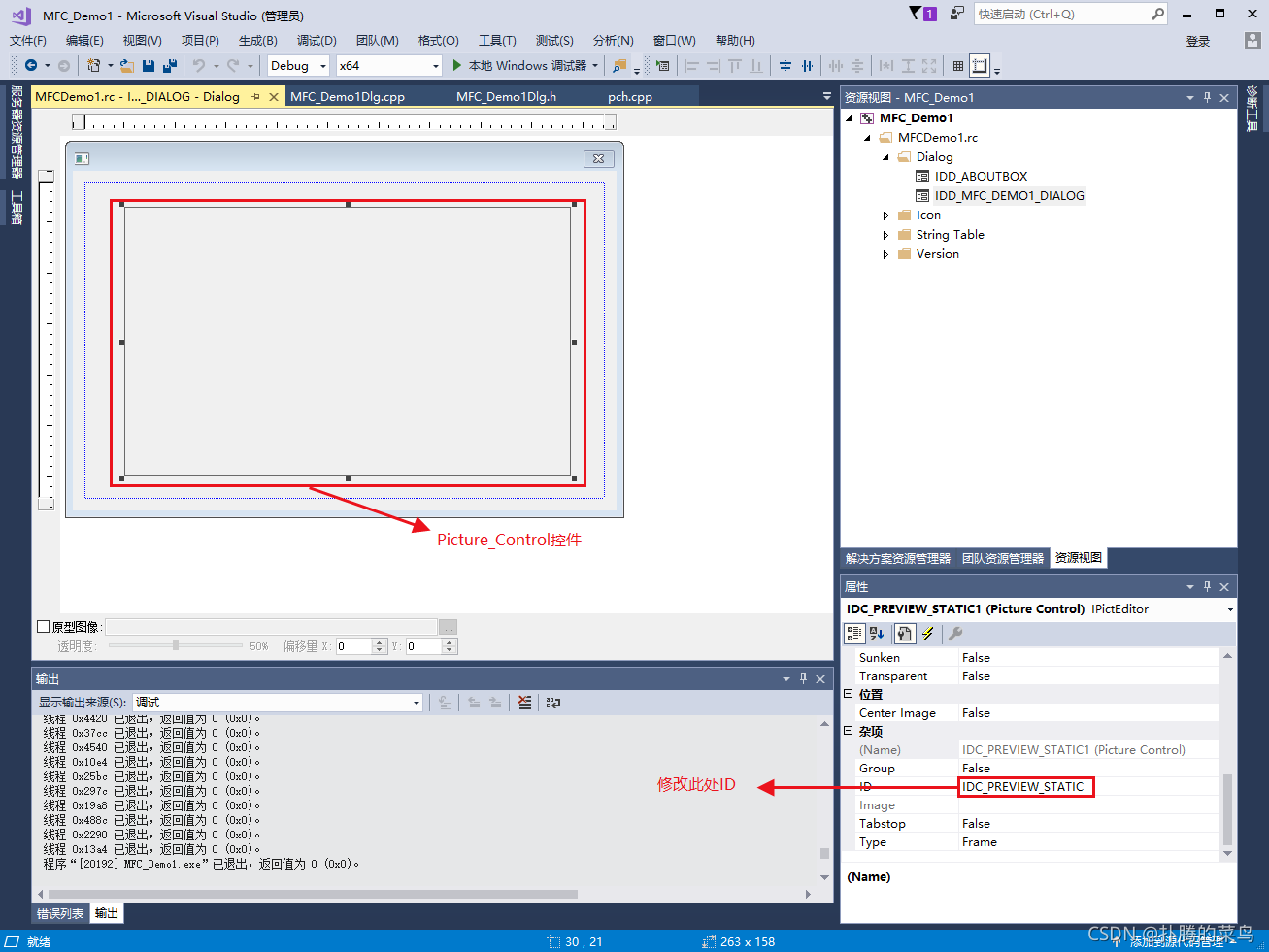
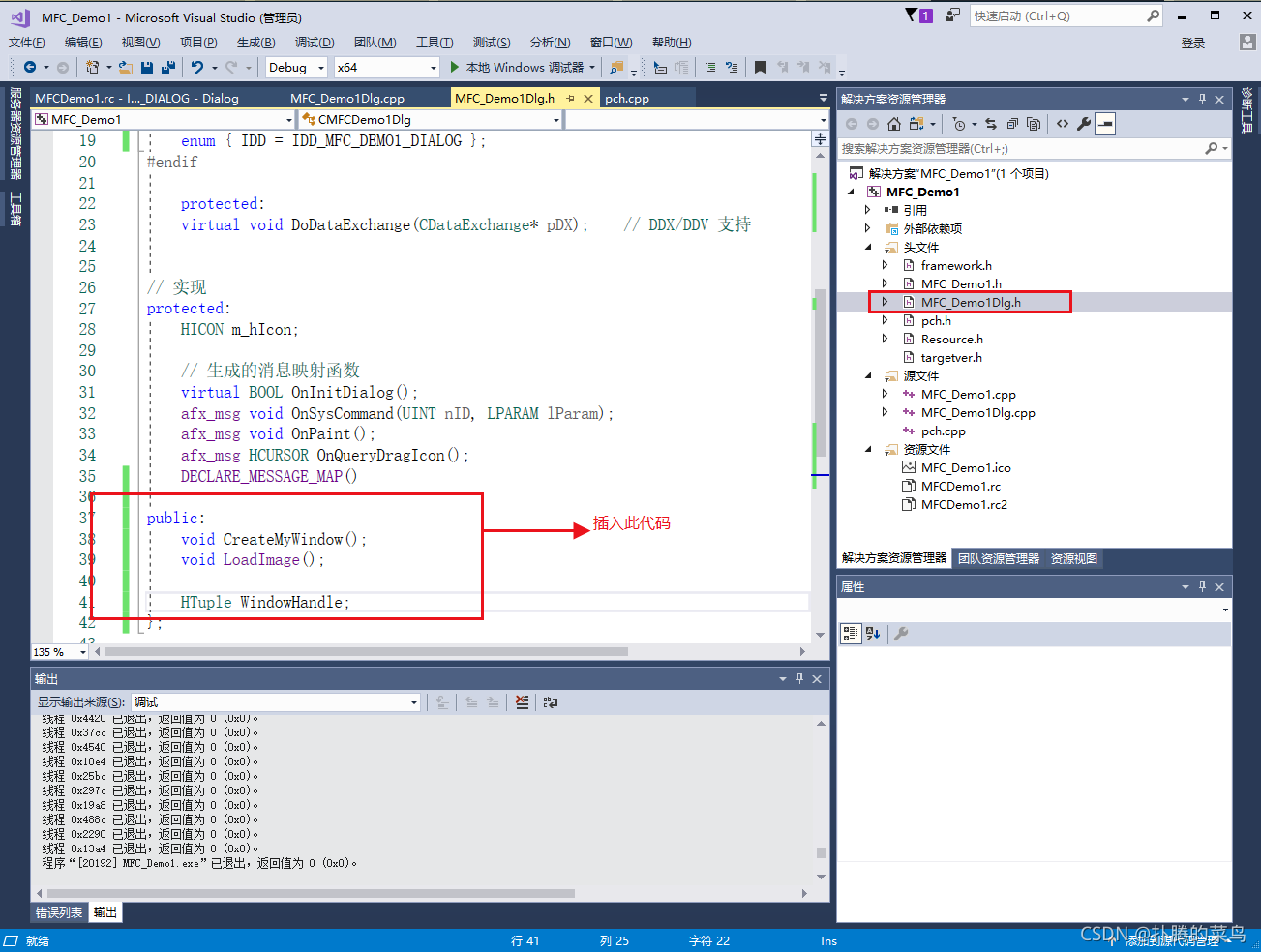
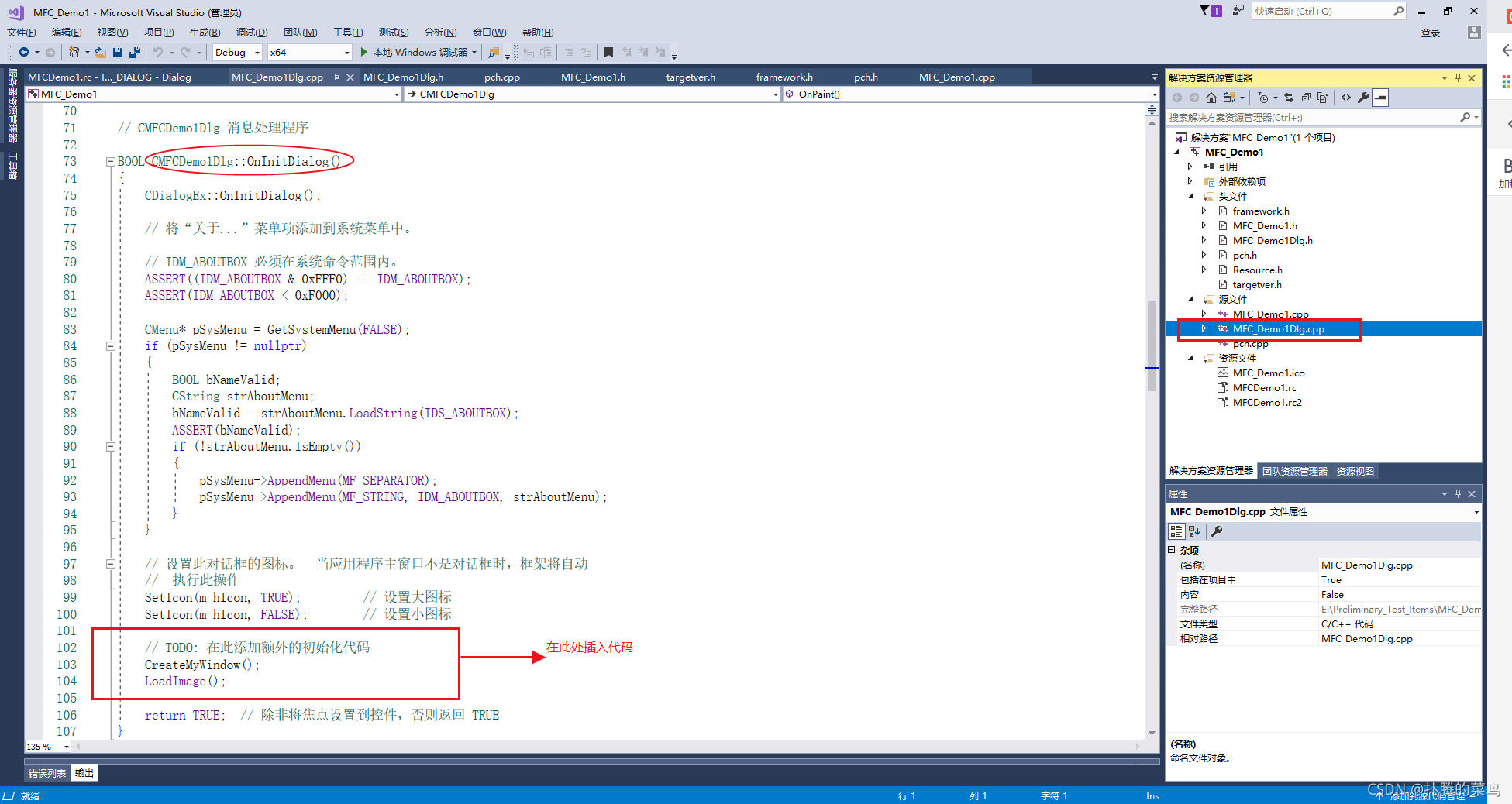
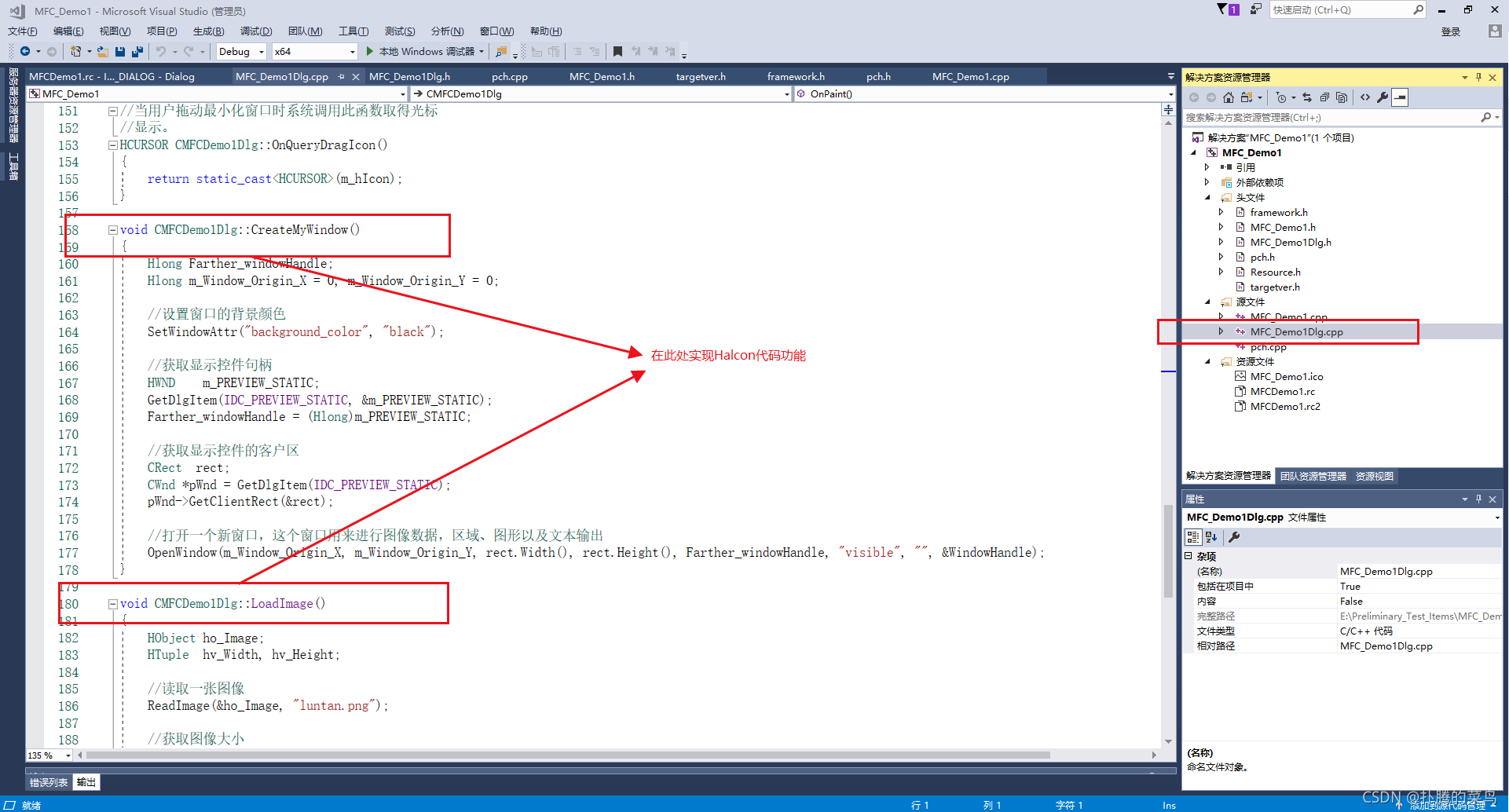
void CMFCDemo1Dlg::CreateMyWindow()
{
Hlong Farther_windowHandle;
Hlong m_Window_Origin_X = 0, m_Window_Origin_Y = 0;
//ЩшжУДАПкЕФБГОАбеЩЋ
SetWindowAttr("background_color", "black");
//ЛёШЁЯдЪОПиМўОфБњ
HWND m_PREVIEW_STATIC;
GetDlgItem(IDC_PREVIEW_STATIC, &m_PREVIEW_STATIC);
Farther_windowHandle = (Hlong)m_PREVIEW_STATIC;
//ЛёШЁЯдЪОПиМўЕФПЭЛЇЧј
CRect rect;
CWnd *pWnd = GetDlgItem(IDC_PREVIEW_STATIC);
pWnd->GetClientRect(&rect);
//ДђПЊвЛИіаТДАПк,етИіДАПкгУРДНјааЭМЯёЪ§Он,ЧјгђЁЂЭМаЮвдМАЮФБОЪфГі
OpenWindow(m_Window_Origin_X, m_Window_Origin_Y, rect.Width(), rect.Height(), Farther_windowHandle, "visible", "", &WindowHandle);
}
void CMFCDemo1Dlg::LoadImage()
{
HObject ho_Image;
HTuple hv_Width, hv_Height;
//ЖСШЁвЛеХЭМЯё
ReadImage(&ho_Image, "luntan.png");
//ЛёШЁЭМЯёДѓаЁ
GetImageSize(ho_Image, &hv_Width, &hv_Height);
//ЩшжУЖдЯѓЯдЪОЕФбеЩЋ
SetColor(WindowHandle, "yellow");
//ЭЈЙ§ИФБфЭМЯёЕФЫѕЗХРДЪЪгІЭМЯёдкДАПкЕФе§ГЃЯдЪО
SetPart(WindowHandle, 0, 0, hv_Height, hv_Width);
//дкДАПкЩЯЯдЪОЭМЯё
DispObj(ho_Image, WindowHandle);
//ЩшжУЮФБОЙтБъЮЛжУ
SetTposition(WindowHandle, hv_Width / 2, hv_Height / 2);
//дкЮФБОЙтБъЮЛжУЯдЪОHelloWorld
WriteString(WindowHandle, "HelloWorld");
}

2ЁЂC#гыHalconЛьКЯБрГЬ
????СїГЬШчЯТ:
????????ЂйЁЂДДНЈC#ЙЄГЬ(Лљгкvs2017):
????????ЂкЁЂВтЪддЫааC#ЙЄГЬ:
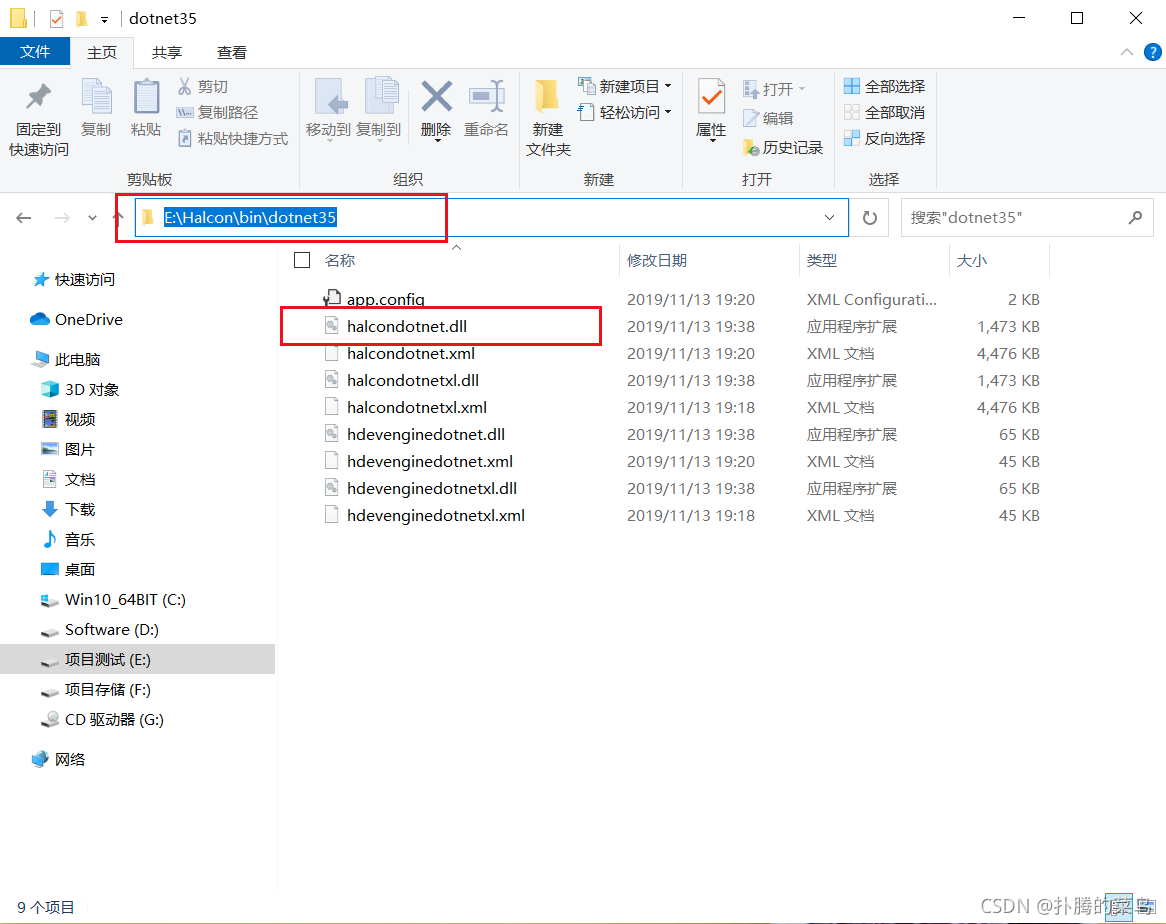
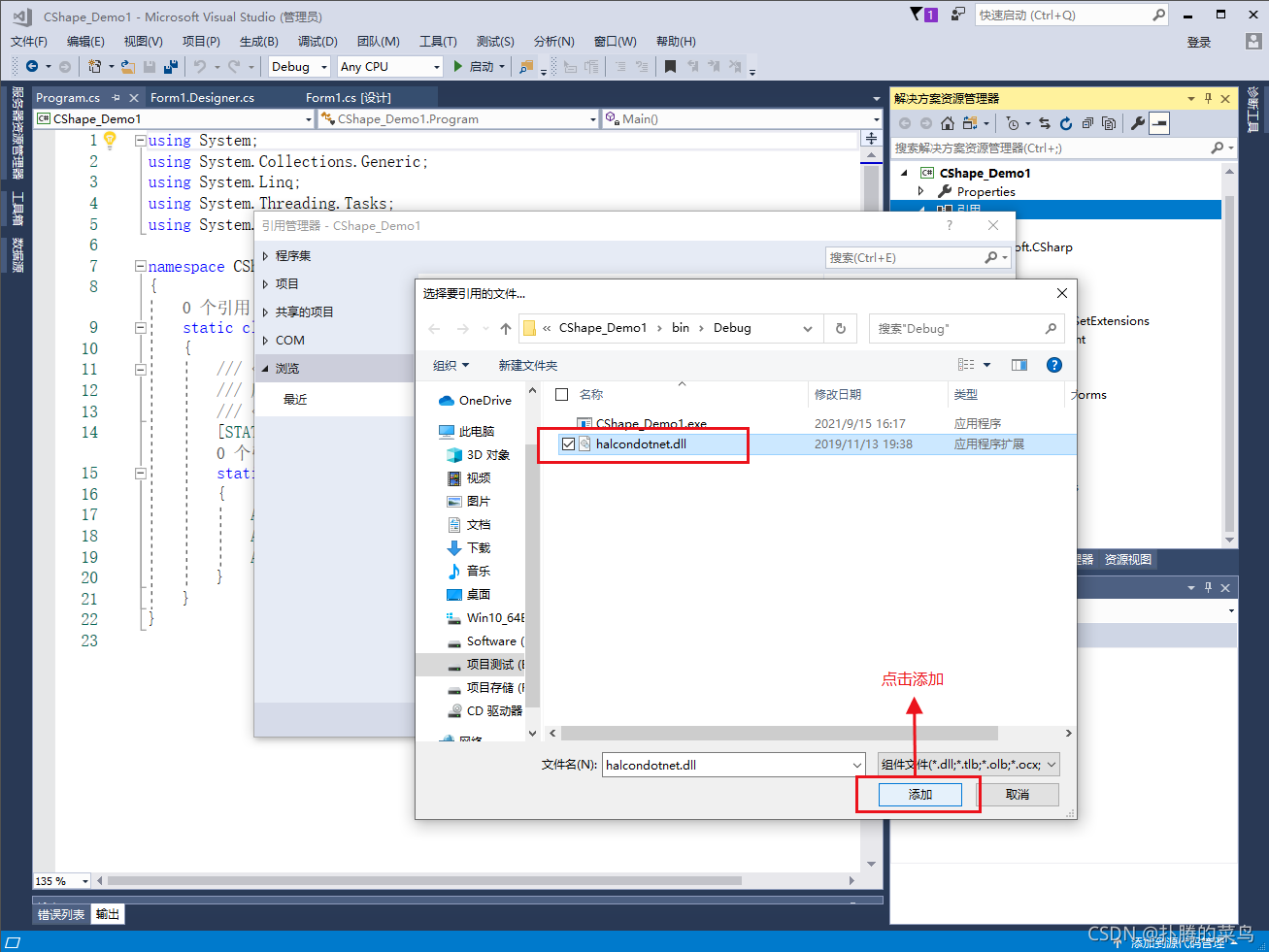
????????ЂлЁЂХфжУHalconЛЗОГ(ДЫХфжУЗНЪНгыC++/MFCХфжУЗНЪНВЛЭЌ)ЁЃЪзЯШ:НЋЁ /Halcon/bin/dotnet35/ ФПТМЯТЕФ halcondotnet.dll ПНБДЕНЙЄГЬDebugФПТМЯТ:
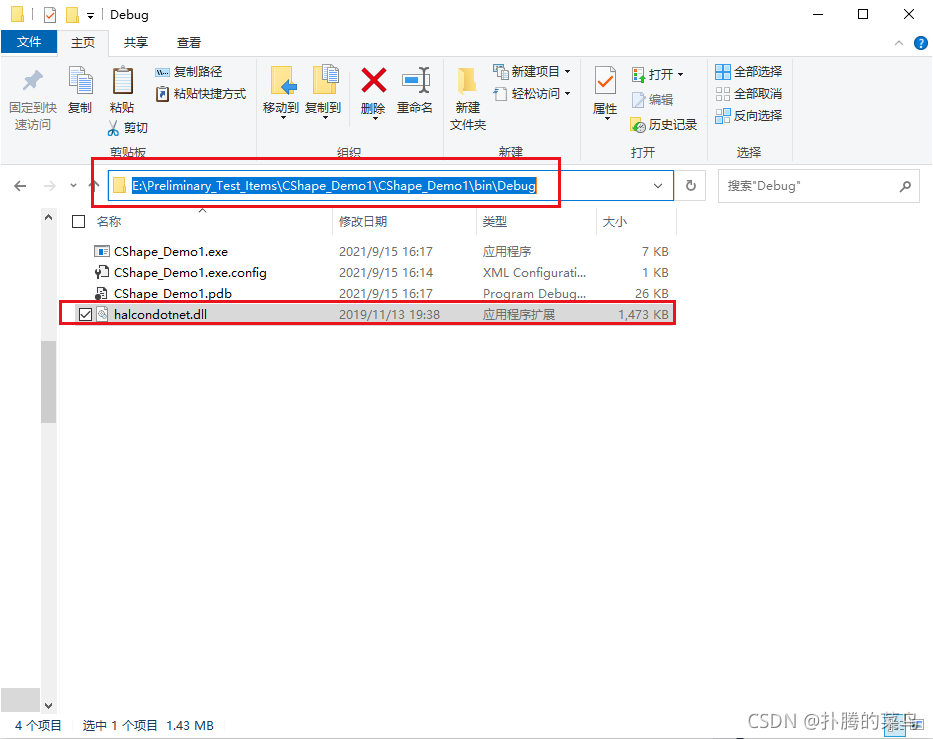
????????ЦфДЮ,дкЙЄГЬФПТМЯТЕФв§гУбЁдёгвМќ,ДђПЊЬэМгв§гУЖдЛАПђ,в§гУ halcondotnet.dll:

????????ЂмЁЂC#гыHalconБрГЬ
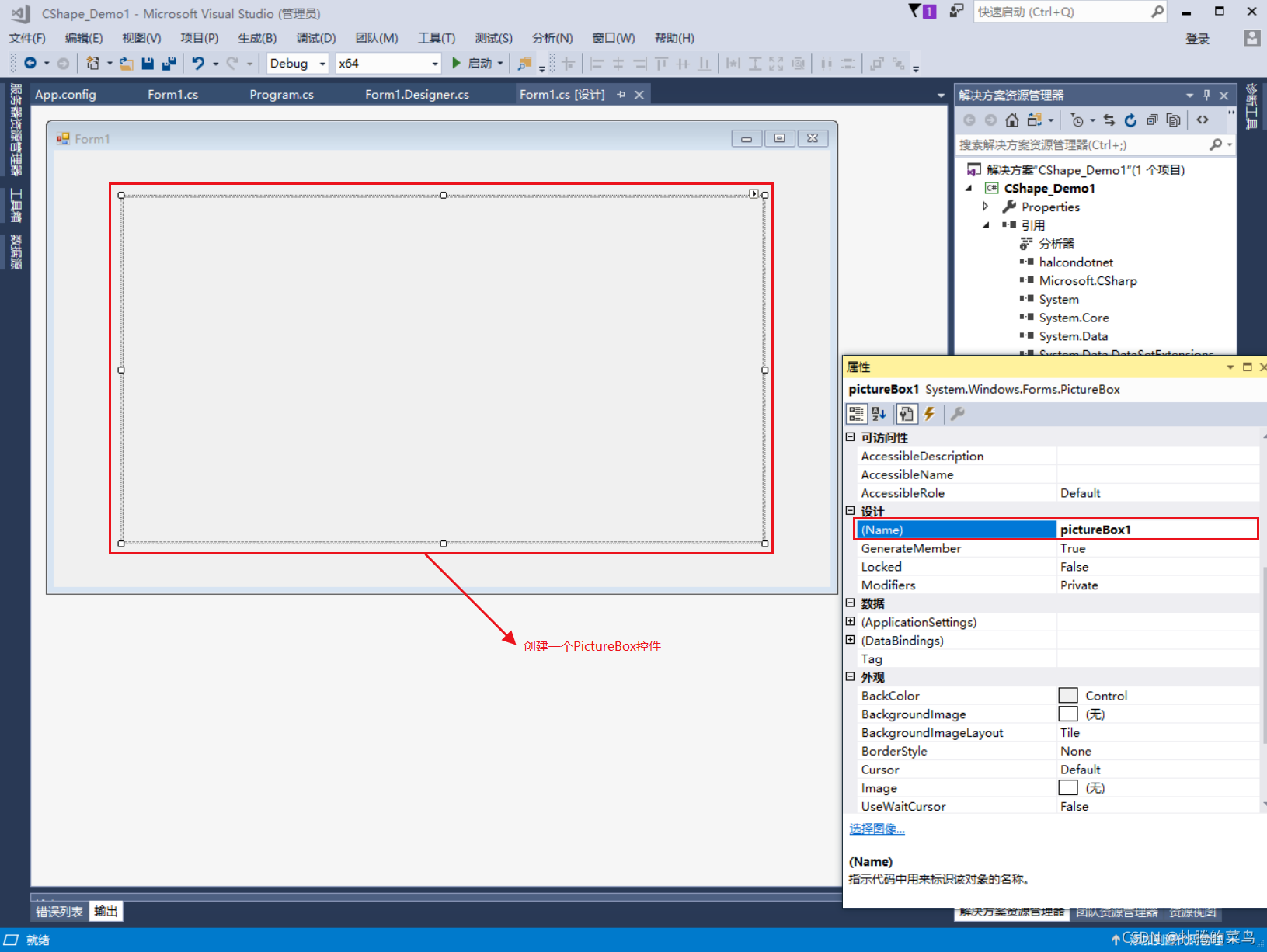
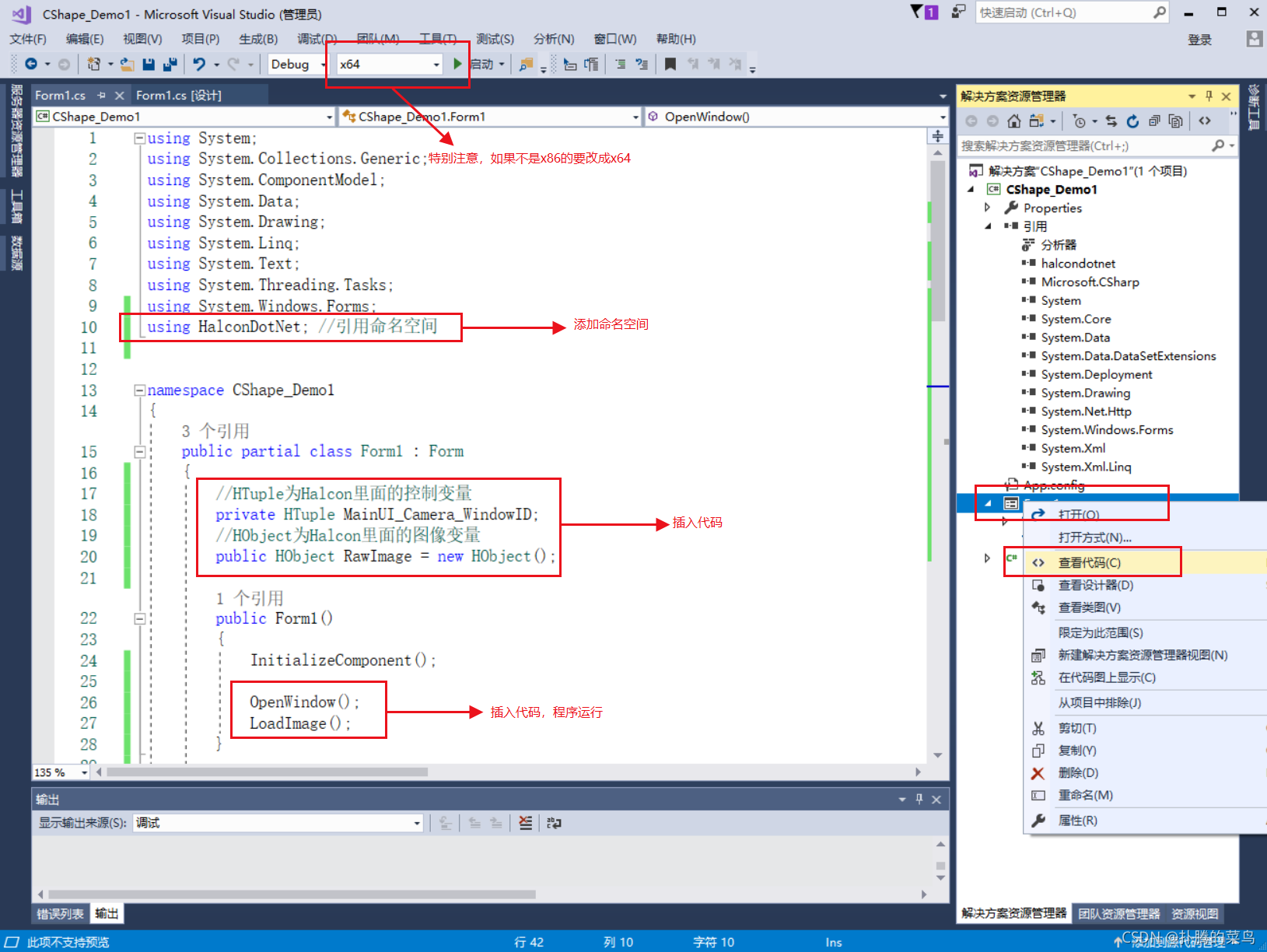
????????ЂнЁЂаЇЙћеЙЪО
????ДњТыЪЕЯж:
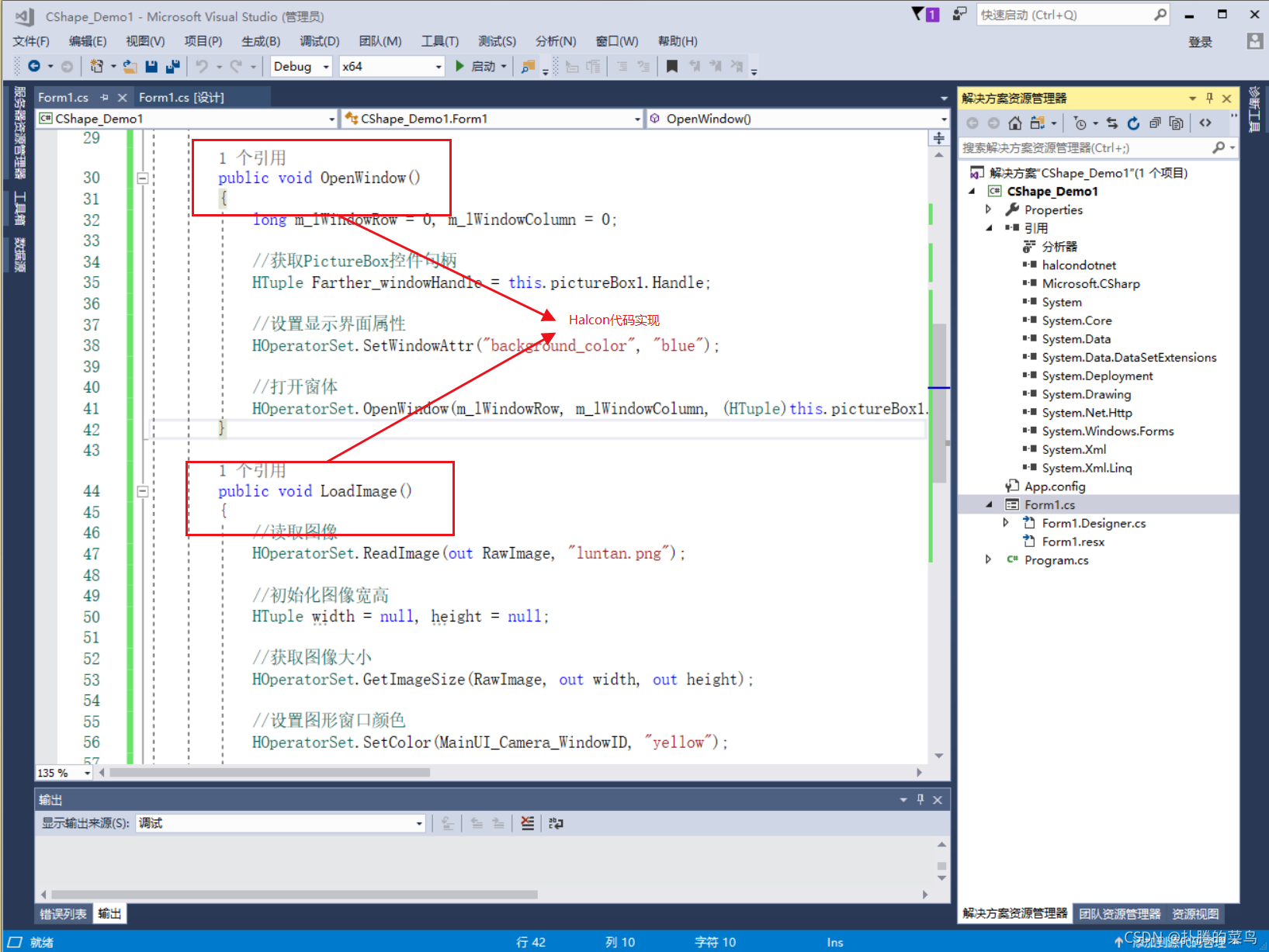
public void OpenWindow()
{
long m_lWindowRow = 0, m_lWindowColumn = 0;
//ЛёШЁPictureBoxПиМўОфБњ
HTuple Farther_windowHandle = this.pictureBox1.Handle;
//ЩшжУЯдЪОНчУцЪєад
HOperatorSet.SetWindowAttr("background_color", "blue");
//ДђПЊДАЬх
HOperatorSet.OpenWindow(m_lWindowRow, m_lWindowColumn, (HTuple)this.pictureBox1.Width, (HTuple)this.pictureBox1.Height, Farther_windowHandle, "visible", "", out MainUI_Camera_WindowID);
}
public void LoadImage()
{
//ЖСШЁЭМЯё
HOperatorSet.ReadImage(out RawImage, "luntan.png");
//ГѕЪМЛЏЭМЯёПэИп
HTuple width = null, height = null;
//ЛёШЁЭМЯёДѓаЁ
HOperatorSet.GetImageSize(RawImage, out width, out height);
//ЩшжУЭМаЮДАПкбеЩЋ
HOperatorSet.SetColor(MainUI_Camera_WindowID, "yellow");
//ЩшжУЯдЪОЧјгђ
HOperatorSet.SetPart(MainUI_Camera_WindowID, 0, 0, height, width);
//ЯдЪОЭМЯё
HOperatorSet.DispObj(RawImage, MainUI_Camera_WindowID);
//ЖЈвхЙтБъЮЛжУ
HOperatorSet.SetTposition(MainUI_Camera_WindowID, width / 2, height / 2);
//дкЙтБъЮЛжУДђгЁЮФБОаХЯЂ
HOperatorSet.WriteString(MainUI_Camera_WindowID, "HelloWorld");
}
3ЁЂHalconВтСПжњЪжЪЙгУ
????ЪЙгУСїГЬ:
????????ЂйЁЂДђПЊВтСПжњЪж
????????ЂкЁЂЪфШы
????????ЂкЁЂБпдЕ
????????ЂлЁЂФЃК§(ГѕВНСЫНт)
????????ФЃК§ВтСП:ЛљгкФЃК§ТпМЁЃ
????????ФЃК§ТпМ:ФЃЗТШЫФдЕФВЛШЗЖЈадИХФюХаЖЯЁЂЭЦРэЫМЮЌЗНЪН,ЖдгкФЃаЭЮДжЊЛђВЛФмШЗЖЈЕФУшЪіЯЕЭГ,вдМАЧПЗЧЯпадЁЂДѓжЭКѓЕФПижЦЖдЯѓ,гІгУФЃК§МЏКЯКЭФЃК§ЙцдђНјааЭЦРэ,БэДяЙ§ЖЩадНчЯоЛђЖЈаджЊЪЖОбщ,ФЃФтШЫФдЗНЪН,ЪЕааФЃК§злКЯХаЖЯ,ЭЦРэНтОіГЃЙцЗНЗЈФбгкЖдИЖЕФЙцдђаЭФЃК§аХЯЂЮЪЬтЁЃ
????????ФЃК§уажЕ:бЁдёзюаЁФЃК§ЗжЪ§ЕФ0.1КЭ1жЎМфЕФжЕ,зюжеЕФФЃК§ЕУЗжЪЧЫљгаИіЬхЕУЗжЕФМИКЮЦНОљжЕЁЃ
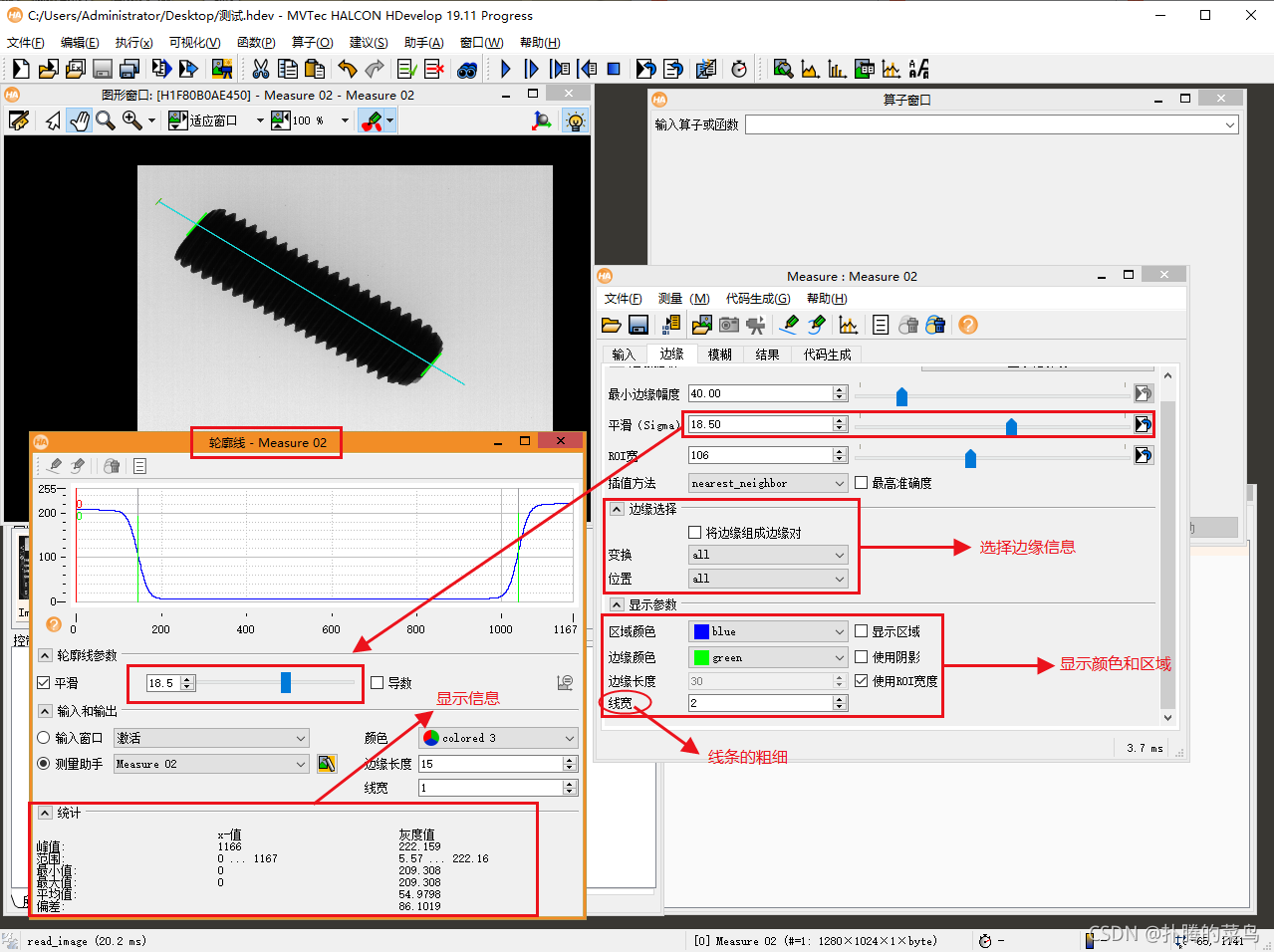
????????ЂмЁЂНсЙћ
????????ЂнЁЂВхШыДњТы

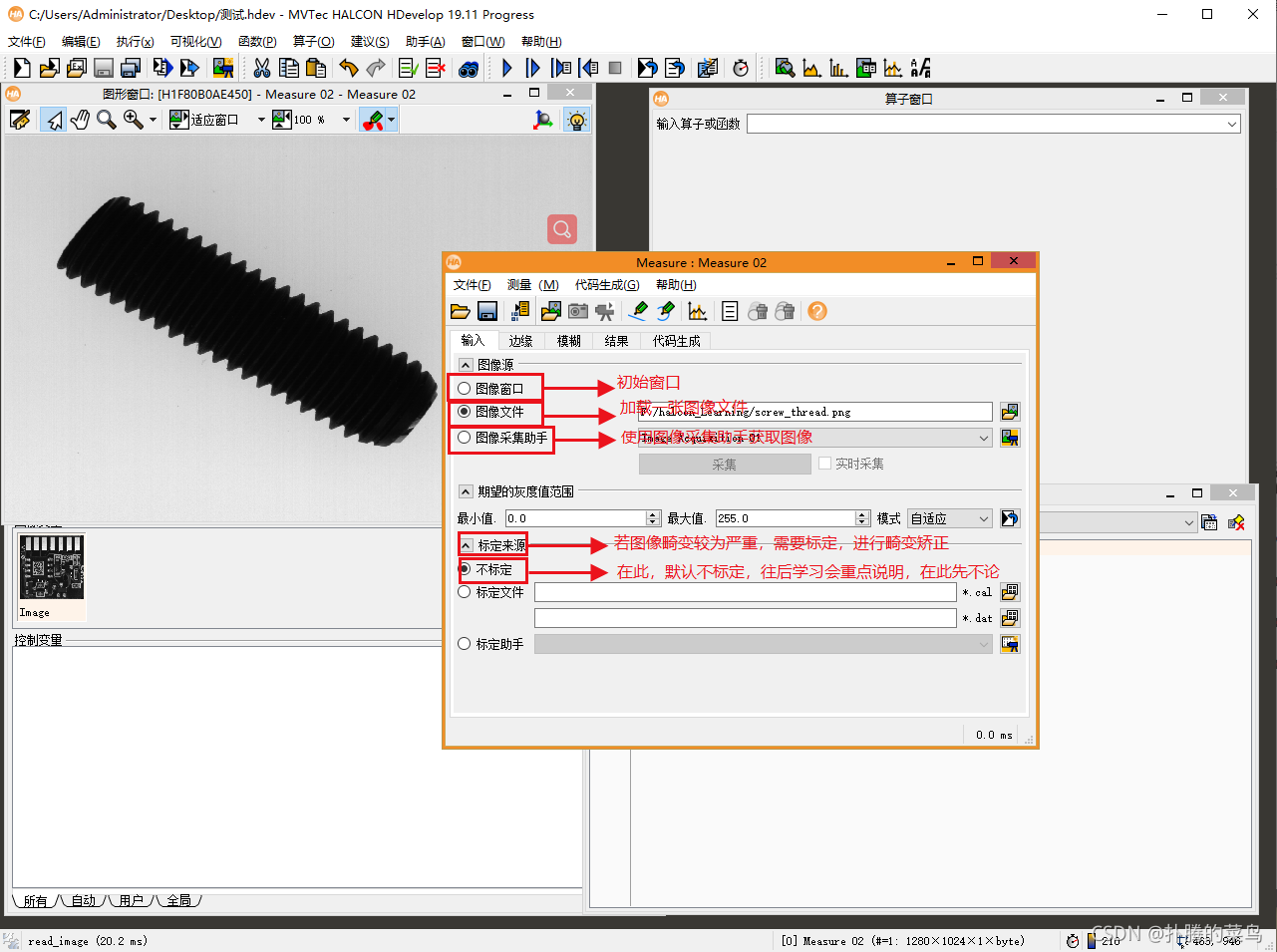
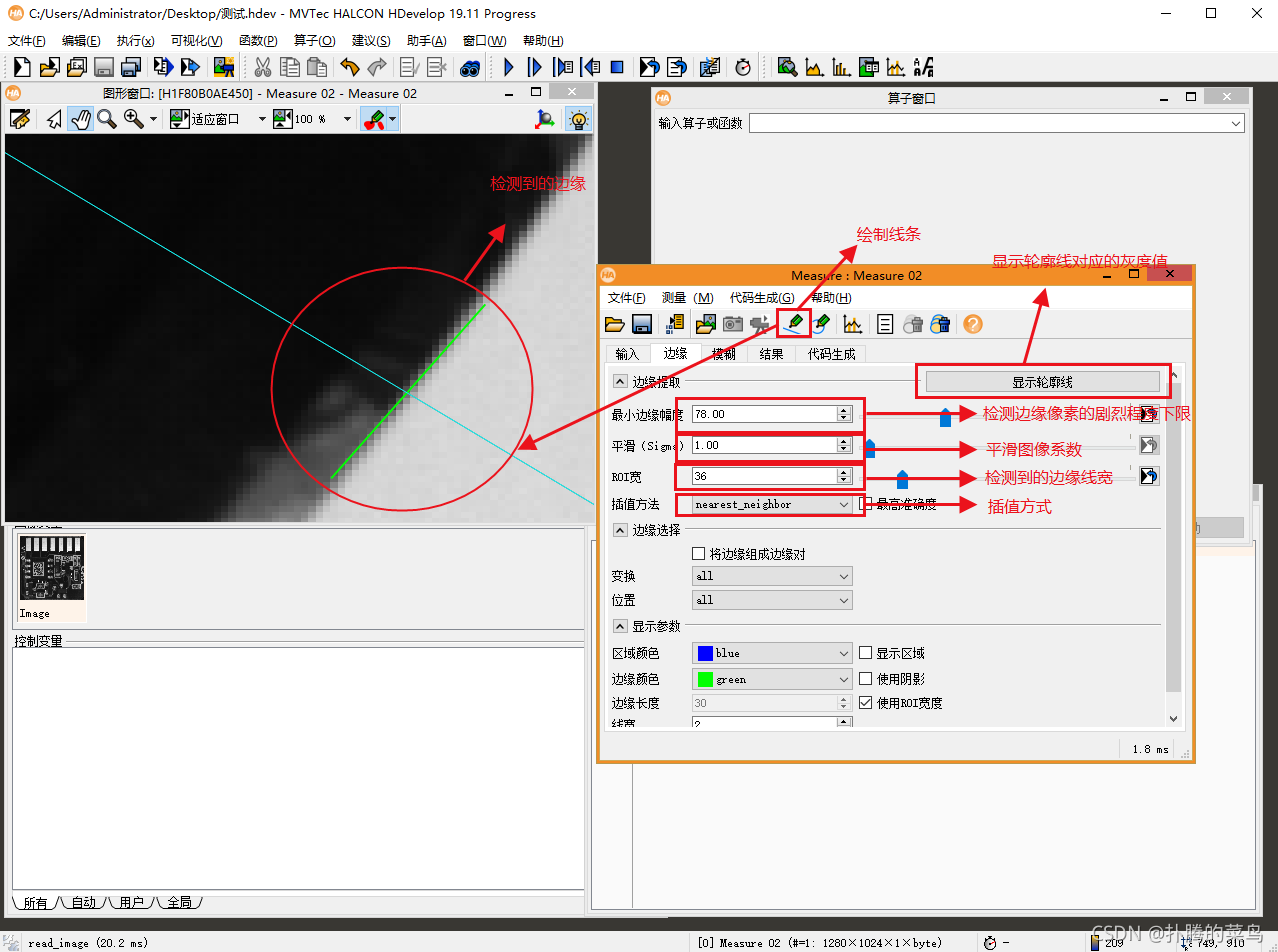
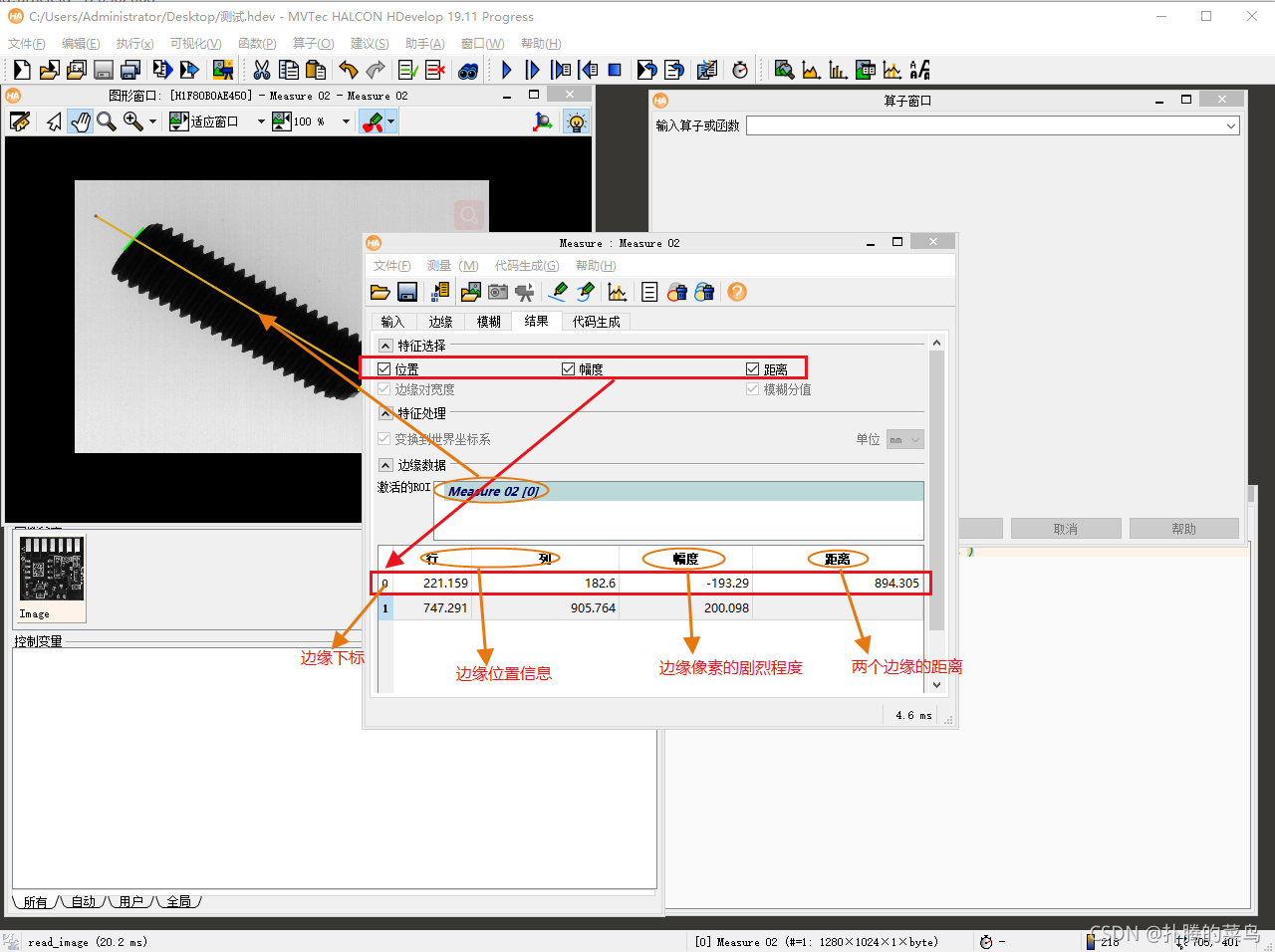
????????ИНМг:ШєДђПЊСЫСНИіЛђЖрИіВтСПжњЪж,ЙиБежњЪжСїГЬ:ДђПЊвЊЙиБеЕФжњЪж(Measure)->ЕуЛїЮФМў ->ЭЫГіжњЪж
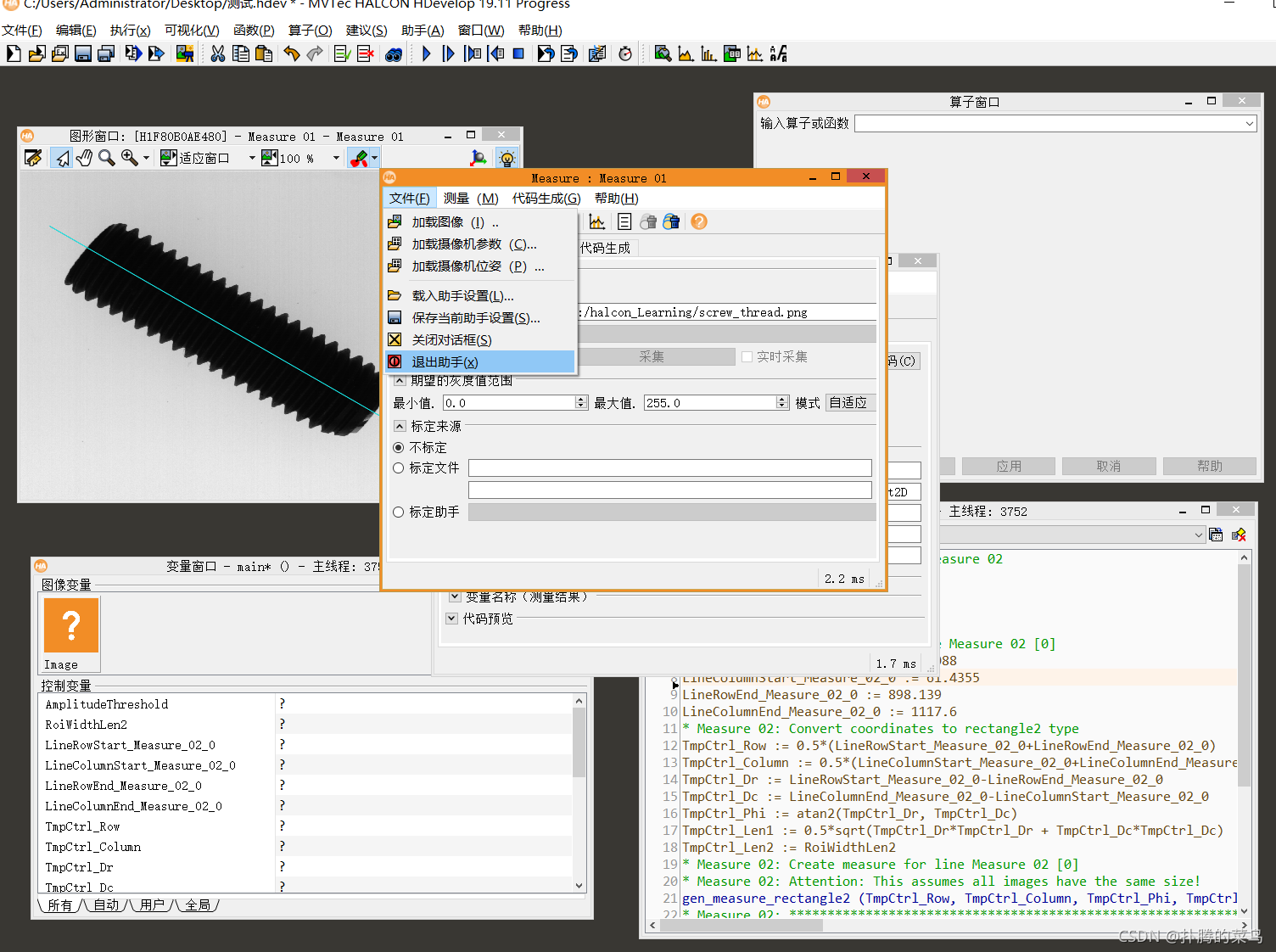
????ДњТыЪЕЯж:

* Measure 02: Code generated by Measure 02
* Measure 02: Prepare measurement
*ЗљЖШуажЕ(T)
AmplitudeThreshold := 40
*ROIПэ(R)
RoiWidthLen2 := 5
*ЛёШЁ HALCON ЯЕЭГВЮЪ§ЕФЕБЧАжЕ
*'int_zooming' ШЗЖЈЭМЯёДІРэФГаЉВНжшЕФОЋЖШЁЃЭЈЙ§НЋ'int_zooming'ЩшжУЮЊ'true'ећЪ§дЫЫуЛђЪЙгУПьЫйИЁЕудЫЫуЁЃЭЈЙ§НЋЦфЩшжУЮЊ'false'НЋЪЙгУИпОЋЖШИЁЕудЫЫуЁЃ
set_system ('int_zooming', 'true')
* Measure 02: Coordinates for line Measure 02 [0]
*ЯпЖЮВтСПЕФЦ№ЪМаа
LineRowStart_Measure_02_0 := 167.088
*ЯпЖЮВтСПЕФЦ№ЪМСа
LineColumnStart_Measure_02_0 := 61.4355
*ЯпЖЮВтСПЕФНижЙаа
LineRowEnd_Measure_02_0 := 898.139
*ЯпЖЮВтСПЕФНижЙСа
LineColumnEnd_Measure_02_0 := 1117.6
* Measure 02: Convert coordinates to rectangle2 type
*НЋзјБъзЊЛЛЮЊrectangle2РраЭ
TmpCtrl_Row := 0.5*(LineRowStart_Measure_02_0+LineRowEnd_Measure_02_0)
TmpCtrl_Column := 0.5*(LineColumnStart_Measure_02_0+LineColumnEnd_Measure_02_0)
TmpCtrl_Dr := LineRowStart_Measure_02_0-LineRowEnd_Measure_02_0
TmpCtrl_Dc := LineColumnEnd_Measure_02_0-LineColumnStart_Measure_02_0
TmpCtrl_Phi := atan2(TmpCtrl_Dr, TmpCtrl_Dc)
TmpCtrl_Len1 := 0.5*sqrt(TmpCtrl_Dr*TmpCtrl_Dr + TmpCtrl_Dc*TmpCtrl_Dc)
TmpCtrl_Len2 := RoiWidthLen2
* Measure 02: Create measure for line Measure 02 [0]
* Measure 02: Attention: This assumes all images have the same size!
*зМБИЬсШЁДЙжБгыОиаЮЕФжББп
*ВЮЪ§1 ОиаЮжааФЕФаазјБъ
*ВЮЪ§2 ОиаЮжааФЕФСазјБъ
*ВЮЪ§3 ОиаЮЕФзнжсгыЫЎЦНЯпЕФНЧЖШ(ЛЁЖШ)
*ВЮЪ§4 ОиаЮЕФвЛАыПэЖШ
*ВЮЪ§5 ОиаЮЕФвЛАыИпЖШ
*ВЮЪ§6 КѓајвЊДІРэЕФЭМЯёПэЖШ
*ВЮЪ§7 КѓајвЊДІРэЕФЭМЯёИпЖШ
*ВЮЪ§8 вЊЪЙгУЕФВюжЕРраЭ Interpolation = 'nearest_neighbor',ВтСПжаЕФЛвЖШжЕЪЧгЩзюНќЯёЫиЕФЛвЖШжЕЕУЕНЕФ,МДЭЈЙ§ГЃЪ§ВхжЕЁЃЖдгкInterpolation = 'bilinear',ЪЙгУЫЋЯпадВхжЕ;ЖдгкInterpolation = 'bicubic',ЪЙгУЫЋШ§ДЮВхжЕЁЃ
*ВЮЪ§9 ВтСПЖдЯѓОфБњ
gen_measure_rectangle2 (TmpCtrl_Row, TmpCtrl_Column, TmpCtrl_Phi, TmpCtrl_Len1, TmpCtrl_Len2, 1280, 1024, 'nearest_neighbor', MsrHandle_Measure_02_0)
* Measure 02: ***************************************************************
* Measure 02: * The code which follows is to be executed once / measurement *
* Measure 02: ***************************************************************
* Measure 02: Load image
*ЖСШЁЭМЯёБфСП
read_image (Image, 'F:/halcon_Learning/screw_thread.png')
* Measure 02: Execute measurements
*жДааВтСП
*ЬсШЁДЙжБгкОиаЮЛђЛЗаЮЛЁЕФжББпЖд
*ВЮЪ§1 ЪфШыЭМЯё
*ВЮЪ§2 ВтСПЖдЯѓОфБњ
*ВЮЪ§3 ИпЫЙЦНЛЌsigma
*ВЮЪ§4 зюаЁБпдЕЗљЖШ
*ВЮЪ§5 ШЗЖЈШчКЮНЋБпЗжзщЮЊБпЖдЕФЛвЖШжЕзЊЛЛРраЭ
*ВЮЪ§6 БпЖдЕФбЁдё
*ВЮЪ§7 ЪфГіЕквЛЬѕБпЕФжааФаазјБъ
*ВЮЪ§8 ЪфГіЕквЛЬѕБпЕФжааФСазјБъ
*ВЮЪ§9 ЪфГіЕквЛЬѕБпЕФБпбиЗљЖШ(ДјЗћКХ)
*ВЮЪ§10 ЪфГіЕкЖўЬѕБпЕФжааФаазјБъ
*ВЮЪ§11 ЪфГіЕкЖўЬѕБпЕФжааФСазјБъ
*ВЮЪ§12 ЪфГіЕкЖўЬѕБпЕФБпбиЗљЖШ(ДјЗћКХ)
*ВЮЪ§13 БпЖдЕФБпжЎМфЕФОрРы
*ВЮЪ§14 СЌајБпЖджЎМфЕФОрРы
measure_pairs (Image, MsrHandle_Measure_02_0, 1, AmplitudeThreshold, 'all', 'all', Row1_Measure_02_0, Column1_Measure_02_0, Amplitude1_Measure_02_0, Row2_Measure_02_0, Column2_Measure_02_0, Amplitude2_Measure_02_0, Width_Measure_02_0, Distance_Measure_02_0)
* Measure 02: Do something with the results
*ЯњЛйВтСПЖдЯѓОфБњ
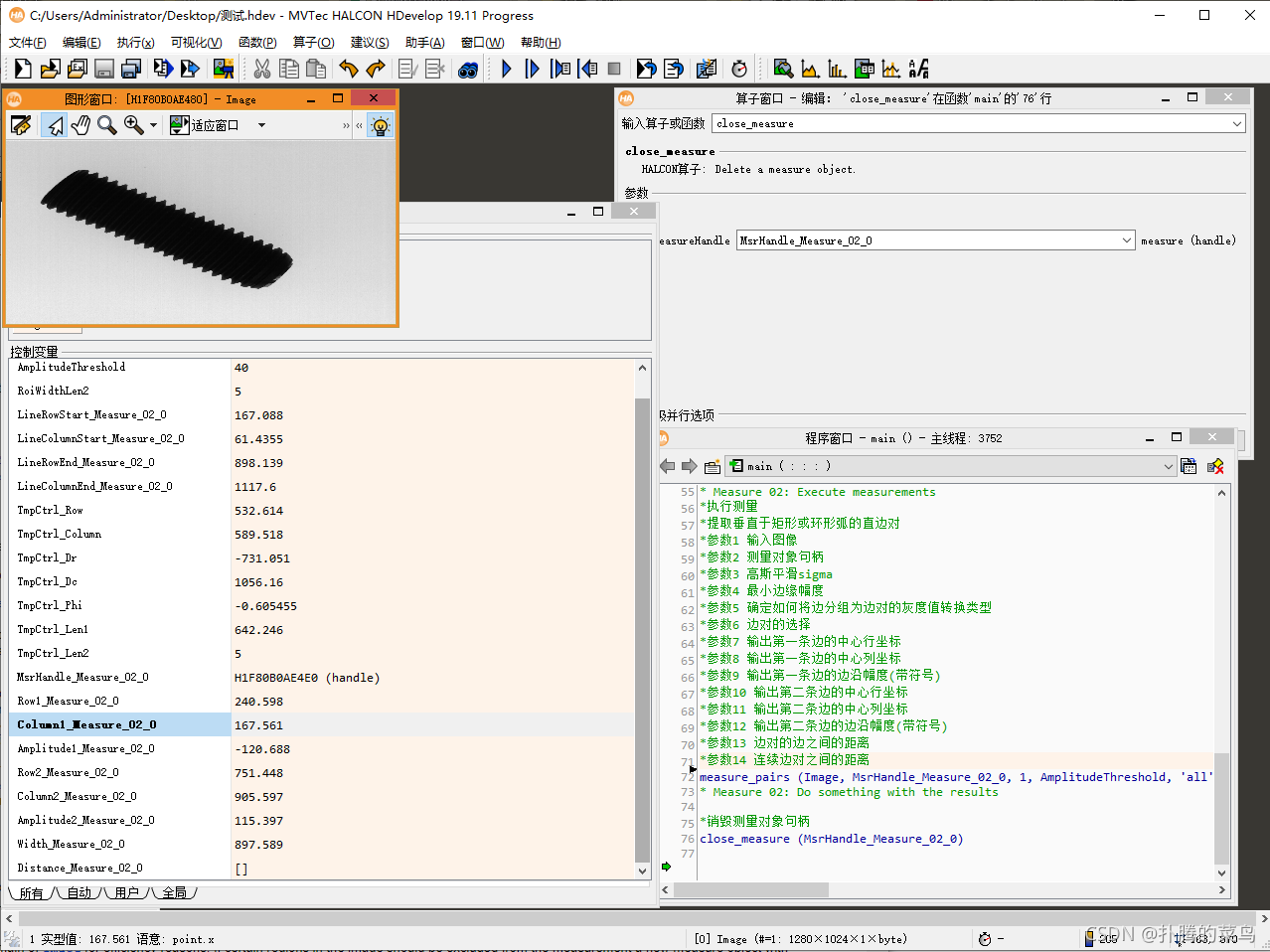
close_measure (MsrHandle_Measure_02_0)
????аЇЙћеЙЪО:
4ЁЂHalconЪЕР§НјНзвЛ(ФтКЯЧјгђЭждВ,ВЂМЦЫужїАыОЖЕФОљжЕКЭЗНВю)
*ЖСШЁЭМЯёБфСП
read_image(Image, 'progres')
*ЛёШЁЭМЯёДѓаЁ
get_image_size(Image, Width, Height)
*ЙиБеЭМааДАПк
dev_close_window()
*ДДНЈвЛИіаТЕФЭМЯёДАПк
dev_open_window(0, 0, Width, Height, 'black', WindowHandle)
*ЯдЪОЭМЯё
dev_display(Image)
*ЩшжУЪфГіЖдЯѓЯдЪОЕФбеЩЋ
dev_set_color('red')
*ЩшжУЧјгђЬюГфЗНЪН
dev_set_draw('margin')
*ЛёШЁОиаЮ
gen_rectangle1(Rectangle, 260, 90, 360, 350)
*МѕЩйЭМЯёЧјгђ
*ВЮЪ§1 ЪфШыЭМЯё
*ВЮЪ§2 аТЖЈвхЧјгђ
*ВЮЪ§3 ЫѕМѕЕНаТЖЈвхЧјгђЕФЭМЯё
reduce_domain(Image, Rectangle, ImageReduced)
*ШЋуажЕЗжИю
threshold(ImageReduced, Region, 0, 150)
*ЛёШЁСЌЭЈЧјгђ
connection(Region, ConnectedRegions)
*ЬиеїЩИбЁ
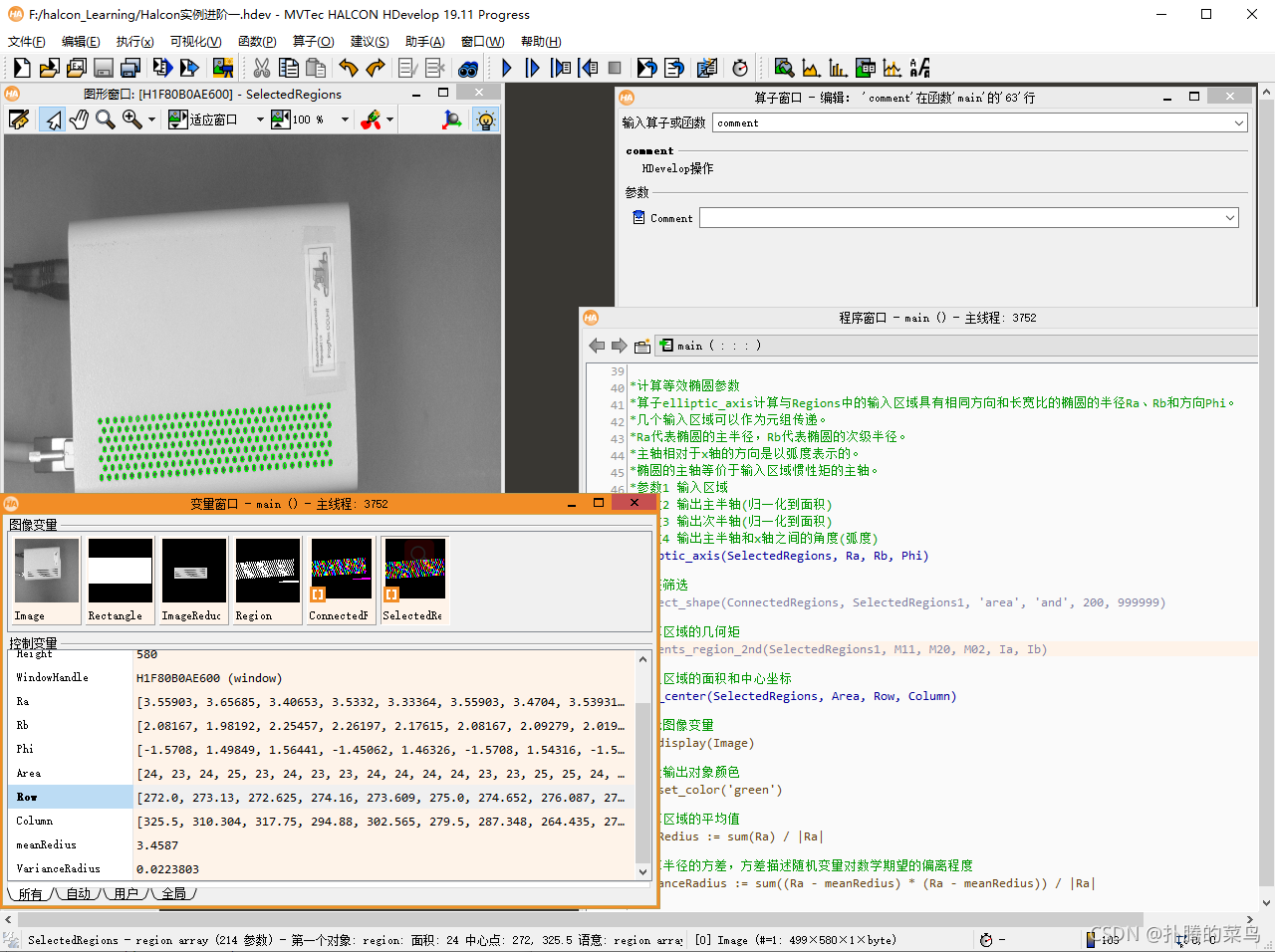
select_shape(ConnectedRegions, SelectedRegions, 'area', 'and', 0, 100)
*МЦЫуЕШаЇЭждВВЮЪ§
*Ыузгelliptic_axisМЦЫугыRegionsжаЕФЪфШыЧјгђОпгаЯрЭЌЗНЯђКЭГЄПэБШЕФЭждВЕФАыОЖRaЁЂRbКЭЗНЯђPhiЁЃ
*МИИіЪфШыЧјгђПЩвдзїЮЊдЊзщДЋЕнЁЃ
*RaДњБэЭждВЕФжїАыОЖ,RbДњБэЭждВЕФДЮМЖАыОЖЁЃ
*жїжсЯрЖдгкxжсЕФЗНЯђЪЧвдЛЁЖШБэЪОЕФЁЃ
*ЭждВЕФжїжсЕШМлгкЪфШыЧјгђЙпадОиЕФжїжсЁЃ
*ВЮЪ§1 ЪфШыЧјгђ
*ВЮЪ§2 ЪфГіжїАыжс(ЙщвЛЛЏЕНУцЛ§)
*ВЮЪ§3 ЪфГіДЮАыжс(ЙщвЛЛЏЕНУцЛ§)
*ВЮЪ§4 ЪфГіжїАыжсКЭxжсжЎМфЕФНЧЖШ(ЛЁЖШ)
elliptic_axis(SelectedRegions, Ra, Rb, Phi)
*ЛёШЁЧјгђЕФУцЛ§КЭжааФзјБъ
area_center(SelectedRegions, Area, Row, Column)
*ЯдЪОЭМЯёБфСП
dev_display(Image)
*ЩшжУЪфГіЖдЯѓбеЩЋ
dev_set_color('green')
*МЦЫуЧјгђЕФЦНОљжЕ
meanRedius := sum(Ra) / |Ra|
*МЦЫуАыОЖЕФЗНВю,ЗНВюУшЪіЫцЛњБфСПЖдЪ§бЇЦкЭћЕФЦЋРыГЬЖШ
VarianceRadius := sum((Ra - meanRedius) * (Ra - meanRedius)) / |Ra|
????????ИНМг:elliptic_axisЫузгЕФМЦЫуСїГЬ:
????????ашЯШСЫНтmoments_region_2nd ЫузгжаЕФИіБ№ВЮЪ§ЁЃ
????????moments_region_2ndМЦЫуregionsжаЪфШыЧјгђЕФМИКЮОи M 11 M_{11} M11?ЁЂ M 20 M_{20} M20?ЁЂ M 02 M_{02} M02?ЁЃНјвЛВНМЦЫуЪфШыЧјгђЕФГЄжсКЭЖЬжс,ВЂдкIaКЭIbжаЗЕЛиЁЃ
????????Цфжа M 20 M_{20} M20?ЗЕЛиааЯрЙиОи, M 02 M_{02} M02?ЗЕЛиСаЯрЙиОиЁЃОи M 11 M_{11} M11?БэЪОЧјгђЕуЕФаазјБъКЭСазјБъжЎМфЕФаЗНВюЁЃ
????????МЦЫуЙЋЪН:
M i j = ІВ ( r , c ) ? R ( r 0 ? r ) i ( c 0 ? c ) i M_{ij} = \Sigma_{(r,c) \epsilon R} (r_0-r)^i(c_0-c)^i Mij?=ІВ(r,c)?R?(r0??r)i(c0??c)i
???????? r 0 r_0 r0?КЭ c 0 c_0 c0?ЪЧЧјгђRЕФжиаФзјБъ, r r rКЭ c c cБщРњЧјгђЕФЫљгаЯёЫиЁЃ
????????ЖдгкШчКЮМЦЫуЖрБпаЮЕФжиаФ,ПЩВЮПМИУВЉПЭ:https://www.jianshu.com/p/39ef232ad531
????????НЋЕУЕНЕФ M 20 M_{20} M20?, M 02 M_{02} M02?КЭ M 11 M_{11} M11?ЙщвЛЛЏЕНУцЛ§,МЦЫужїАыОЖRaКЭДЮАыОЖRbвдМАЗНЯђphiЁЃ
????????МЦЫуЙЋЪН:
R a = 8 ( M 20 + M 02 + ( M 20 ? M 02 ) 2 + 4 M 11 2 ) 2 Ra = \frac{\sqrt{8(M_{20} + M_{02}+\sqrt{(M_{20}-M_{02})^2 + 4M_{11}^2})}}{2} Ra=28(M20?+M02?+(M20??M02?)2+4M112??)??
R b = 8 ( M 20 + M 02 ? ( M 20 ? M 02 ) 2 + 4 M 11 2 ) 2 Rb = \frac{\sqrt{8(M_{20} + M_{02}-\sqrt{(M_{20}-M_{02})^2 + 4M_{11}^2})}}{2} Rb=28(M20?+M02??(M20??M02?)2+4M112??)??
P h i = ? 0.5 ? a t a n 2 ( 2 M 11 , M 02 ? M 20 ) Phi = -0.5 * atan2(2M_{11}, M_{02} - M_{20}) Phi=?0.5?atan2(2M11?,M02??M20?)
????аЇЙћеЙЪО:
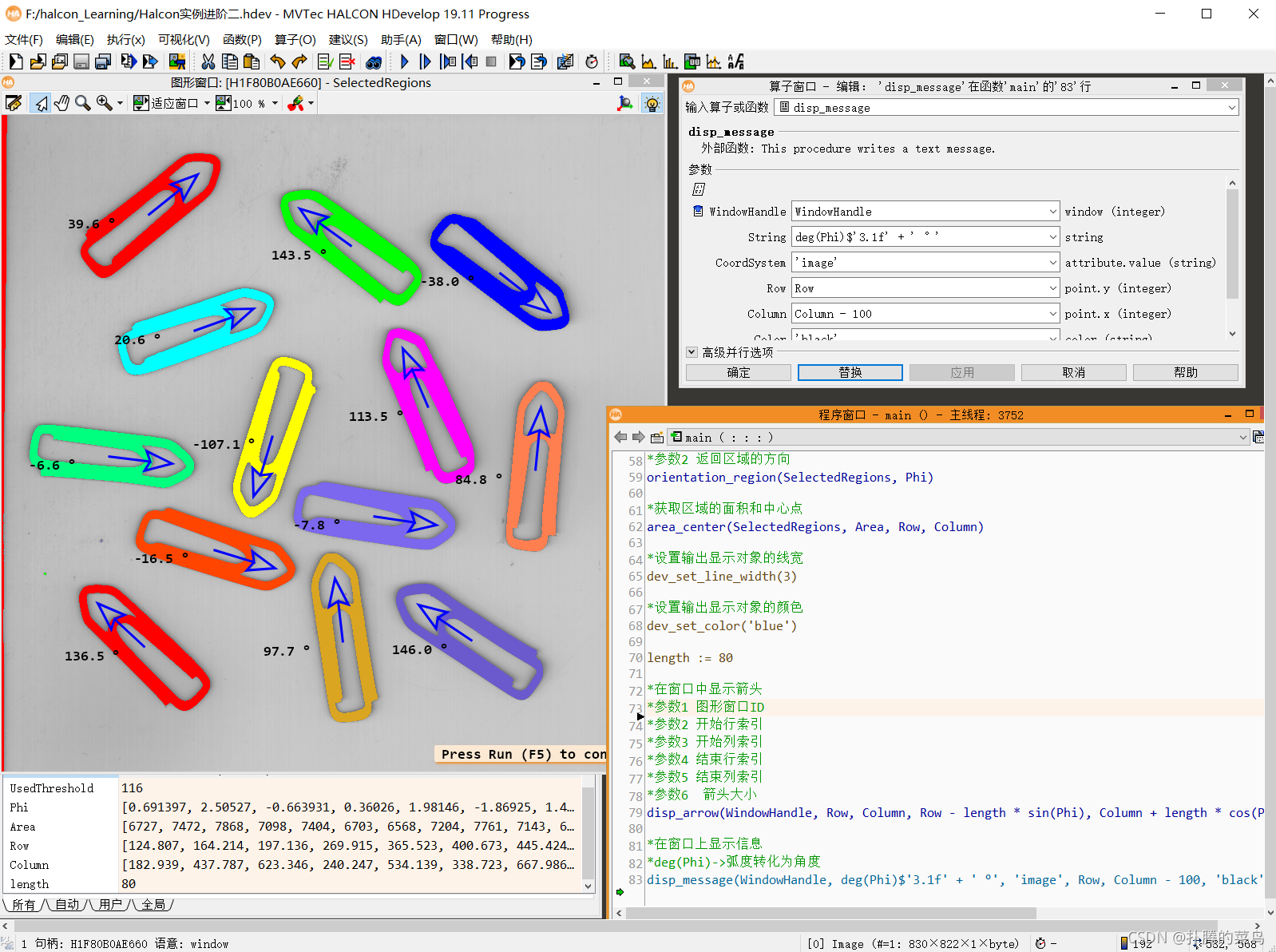
5ЁЂHalconЪЕР§НјНзЖў(ХаБ№ЛиаЮеыЕФЗНЯђ)
*ДђПЊЭМЯёБфСП
read_image(Image, 'clip')
*ЛёШЁЭМЯёДѓаЁ
get_image_size(Image, Width, Height)
*ЙиБевбОДђПЊЕФДАПк
dev_close_window()
*ДДНЈвЛИіаТЕФЭМаЮДАПк
dev_open_window(0, 0, Width, Height, 'black', WindowHandle)
*ЯдЪОЭМЯёБфСП
dev_display(Image)
*ЩшжУЖРСЂгкВйзїЯЕЭГЕФзжЬх
*ВЮЪ§1 ЭМаЮДАПкID
*ВЮЪ§2 ЩшжУзжЬхДѓаЁ ФЌШЯжЕЮЊ:16
*ВЮЪ§3 ЩшжУзжЬхРраЭ
*ВЮЪ§4 ЪЧЗёЪЙгУДжЬх 'true'ЪЧЪЙгУДжЬх,'false'ЪЧВЛЪЙгУДжЬх
*ВЮЪ§5 ЪЧЗёЪЙгУЧуаБ 'true'ЪЧЪЙгУЧуаБ,'false'ЪЧВЛЪЙгУЧуаБ
set_display_font (WindowHandle, 16, 'mono', 'true', 'false')
*етИіЙ§ГЬдкЦСФЛгвЯТНЧЯдЪОЁАЕуЛїдЫааМЬајЁБ
*ВЮЪ§1 ЭМаЮДАПкID
*ВЮЪ§2 ЖЈвхЮФБОбеЩЋ НЈвщжЕ: 'black', 'blue', 'yellow', 'red', 'green', 'cyan', 'magenta', 'forest green', 'lime green', 'coral', 'slate blue'
*ВЮЪ§3 ШчЙћЩшжУЮЊЁАtrueЁБ,ЮФБОНЋБЛаДШывЛИіАзПђжа;ШєЩшжУЮЊ'false'дђУЛгаШЮКЮаЇЙћ
disp_continue_message(WindowHandle, 'black', 'true')
*ЭЃжЙГЬађжДаа
*stopВйзїЗћЭЃжЙHDevelopГЬађЕФСЌајжДааЁЃ
*ШчЙћЗЂЩњетжжЧщПі,PCБЃГждкЭЃжЙгяОф(ЖјВЛЪЧЗХдкЯТвЛИіПЩжДааГЬађаа),вдБужБНгЯдЪОГЬађжаЖЯЕФдвђ,МДЪЙгааэЖрзЂЪЭЛђЦфЫћВЛПЩжДааЕФГЬађааЁЃ
*ИУВйзїЗћЯрЕБгкВЫЕЅРИжаЕФStopЖЏзї(F9)ЁЃПЩвдЭЈЙ§RunВйзї(F5)ЧсЫЩЕиМЬајИУГЬађЁЃ
*ПЩвдЭЈЙ§дкЪзбЁЯюЖдЛАПђжаЩшжУЪБМфВЮЪ§РДжиаТЖЈвхааЮЊЁЃжДааВЛЛсЭЃжЙ,ЖјЪЧМЬај
stop()
*ЖўжЕЛЏуажЕ
binary_threshold(Image, Region, 'max_separability', 'dark', UsedThreshold)
*ЛёШЁСЌЭЈЧјгђ
connection(Region, ConnectedRegions)
*ЬиеїЩИбЁ
select_shape(ConnectedRegions, SelectedRegions, 'area', 'and', 5000, 10000)
*ЩшжУЧјгђЕФЬюГфЗНЪН
dev_set_draw('margin')
*ЩшжУЪфГіЯдЪОЖдЯѓЕФбеЩЋ
dev_set_colored(12)
*ЯдЪОЙ§ТЫКѓЕФЧјгђ
dev_display(SelectedRegions)
*ЛёШЁЙ§ТЫКѓЧјгђЕФЗНЯђ
*ИУВйзїЗћЛљгкelliptic_axis
*ВЮЪ§1 ДјМьВтЕФЧјгђ
*ВЮЪ§2 ЗЕЛиЧјгђЕФЗНЯђ
orientation_region(SelectedRegions, Phi)
*ЛёШЁЧјгђЕФУцЛ§КЭжааФЕу
area_center(SelectedRegions, Area, Row, Column)
*ЩшжУЪфГіЯдЪОЖдЯѓЕФЯпПэ
dev_set_line_width(3)
*ЩшжУЪфГіЯдЪОЖдЯѓЕФбеЩЋ
dev_set_color('blue')
length := 80
*дкДАПкжаЯдЪОМ§ЭЗ
*ВЮЪ§1 ЭМаЮДАПкID
*ВЮЪ§2 ПЊЪМааЫїв§
*ВЮЪ§3 ПЊЪМСаЫїв§
*ВЮЪ§4 НсЪјааЫїв§
*ВЮЪ§5 НсЪјСаЫїв§
*ВЮЪ§6 М§ЭЗДѓаЁ
disp_arrow(WindowHandle, Row, Column, Row - length * sin(Phi), Column + length * cos(Phi), 4)
*дкДАПкЩЯЯдЪОаХЯЂ
*deg(Phi)->ЛЁЖШзЊЛЏЮЊНЧЖШ
disp_message(WindowHandle, deg(Phi)$'3.1f' + ' Ёу', 'image', Row, Column - 100, 'black', 'false')
????аЇЙћеЙЪО:
6ЁЂHalconЪЕР§НјНзШ§(здЖЏбАевPCB(ЕчТЗАх)ЩЯЕФPads(ЕцАх)Чјгђ)
*ЖСШЁЭМЯёБфСП
read_image(Image, 'die_pads')
*ЙиБеЭМаЮДАПк
dev_close_window()
*ЛёШЁЭМЯёДѓаЁ
get_image_size (Image, Width, Height)
*ДДНЈвЛИіаТЕФЭМаЮБфСП
dev_open_window (0, 0, Width * 2, Height * 2, 'black', WindowHandle)
*ЯдЪОЭМЯёБфСП
dev_display(Image)
*ЩшжУЯдЪОЭМЯёДѓаЁ
dev_set_part(0, 0, Height - 1, Width - 1)
*ЪЙгУШЋОжуажЕЖдЭМЯёНјааПьЫйуажЕДІРэ
*Fast_thresholdДгЪфШыЭМЯёжабЁШЁЛвЖШжЕgТњзувдЯТЬѕМўЕФЯёЫи:
*MinGray <= g <= MaxGray
*ЮЊСЫМѕЩйДІРэЪБМф,бЁдёЗжСНВНЭъГЩ:ЪзЯШ,ДІРэЫљгаЮЛгкЫљбЁЫЎЦНЯпЩЯЕФЕу,етаЉЕуЕФОрРыЪЧMinSizeЁЃ
*дкЯТвЛВНжа,ЫљгажЎЧАбЁдёЕФЕуЕФСкгђ(ДѓаЁ(2*MinSize+1) x (2*MinSize+1))БЛДІРэЁЃ
*дкжЇГжSSE2жИСюМЏЕФЖрКЫМЦЫуЛњЩЯ,thresholdКмПЩФмБШfast_thresholdПьЁЃ
*Fast_thresholdПЩФмжЛдкФЧаЉЬиадВЛПЩгУЕФЧщПіЯТБЛгХЯШЪЙгУ,Р§ШчдкЧЖШыЪНЦНЬЈЩЯ
*ВЮЪ§1 ЪфШыЭМЯё
*ВЮЪ§2 ЗжИюКѓЕФЧјгђ
*ВЮЪ§3 (MinGray)ЛвЖШзюаЁжЕ
*ВЮЪ§4 (MaxGray)ЛвЖШзюДѓжЕ
*ВЮЪ§5 MinSize(вЊЬсШЁЕФЖдЯѓзюаЁГпДч)
fast_threshold(Image, Region, 180, 255, 20)
*ЛёШЁСЌЭЈЧјгђ
connection(Region, ConnectedRegions)
*ЬиеїЩИбЁ
select_shape (ConnectedRegions, SelectedRegions, ['area','anisometry'], 'and', [200,1], [1200,2])
*ЮоЬѕМўЬюГфЙ§ТЫМфЯЖ
fill_up(SelectedRegions, RegionFillUp)
*НЋЬюГфЧјгђаЮзДзЊЛЏЮЊЭЙаЭ
*ВЮЪ§1 ашвЊзЊЛЏЕФЧјгђ
*ВЮЪ§2 зЊЛЏКѓЕФЧјгђ
*ВЮЪ§3 зЊЛЏРраЭ ФЌШЯжЕ:'convex'ЭЙАќ
*НЈвщжЕ:'ellipse'ЭждВ
*'outer_circle'зюаЁЭтНгдВ
*'inner_circle'зюДѓФкНгдВ
*'rectangle1'ЦНаагкзјБъжсЕФзюаЁЕФЭтНгОиаЮ
*'rectangle2' зюаЁЕФЗтБеОиаЮ
*'inner_rectangle1'гыЧјгђФкзюДѓЕФЦНаажсОиаЮ
*'inner_center' ЪфШыЧјгђЙЧМмЩЯЕНЪфШыЧјгђжиаФОрРызюаЁЕФЕу
shape_trans(RegionFillUp, RegionTrans, 'convex')
*АбвЛИіЧјгђЫѕаЁЕНЫќЕФБпНчЁЃ
*ВЮЪ§1 вЊМЦЫуБпНчЕФЧјгђ
*ВЮЪ§2 ВњЩњЕФБпНч
*ВЮЪ§3 БпНчРраЭ ФЌШЯжЕ'inner'ТжРЊЯпдкдЧјгђФк
*НЈвщжЕ:'inner_filled' ТжРЊЯпЮЛгкдЪМЧјгђФк,ЪфШыЧјгђФкВПЕФПзЖДБЛвжжЦЁЃгЩгкЫуЗЈгХЛЏ,етИіТжРЊПЩФмгыгУЁАФкЁБЕУЕНЕФЯргІТжРЊТдгаВЛЭЌ
*'outer' ТжРЊЪЧдЪМЧјгђЭтЕФвЛИіЯёЫи
boundary (RegionTrans, RegionBorder, 'inner')
*аЮЬЌбЇХђеЭ
dilation_circle (RegionBorder, RegionDilation, 2.5)
*НЋХђеЭКѓЕФЧјгђКЯВЂЮЊвЛИіЧјгђ
union1 (RegionDilation, RegionUnion)
*МѕЩйЭМЯёЧјгђ
reduce_domain(Image, RegionUnion, ImageReduced)
*ЖдЭМЯёНјааБпдЕЬсШЁ
edges_sub_pix (ImageReduced, Edges, 'sobel_fast', 0.5, 20, 40)
*ЖдxldЧјгђНјааЬиеїЩИбЁ(гыselect_shapeВЮЪ§РрЫЦ)
select_shape_xld (Edges, SelectedContours, 'contlength', 'and', 10, 200)
*НЋЯрСкЕФТжРЊКЯВЂЮЊвЛИіТжРЊ
*ЭГвЛКЯВЂXLD ТжРЊЪ§зщЕФЫљгаЖЫЕуППНќдквЛЦ№ЕФТжРЊЁЃ
*ЭГвЛТжРЊгЩЪфШыТжРЊЕФТжРЊЕуЕФДЎСЊзщГЩЁЃ
*ШчгаБивЊ,етаЉЪфШыТжРЊЕуЕФЫГађНЋБЛЗзЊ,вдБуБиаыСЌНгЕФТжРЊЕФЖЫЕудкНсЙћЕуСаБэжаЪЧжБНгЯрСкЕФЁЃ
*жиИДДЫВйзї,жБЕНВЛдйгаЮДСЌНгЕФЯрСкТжРЊ
*ВЮЪ§1 ЪфШыXLDТжРЊ
*ВЮЪ§2 ЪфГіСЌНгКѓЕФXLDТжРЊ
*ВЮЪ§3 ЕШИпЯпЖЫЕуЕФзюДѓОрРы
*ВЮЪ§4 ЕШИпЯпЖЫЕуЯрЖдНЯГЄЕФЕШИпЯпГЄЖШЕФзюДѓОрРы
*ВЮЪ§5 УшЪіТжРЊЪєадДІРэЕФФЃЪН ФЌШЯжЕ:'attr_keep' ЫљгаЪєадЖМБЛИДжЦЕНЪфГіжа,ВЂЧвЁЊЁЊШчЙћвЛИіТжРЊБиаыБЛЗзЊвдСЌНгЕНСэвЛИіТжРЊЁЊЁЊЫќУЧНЋЪЪгІаТЕФЗНЯђ
*НЈвщжЕ:ЖдгкДѓСПЕФЪфШыТжРЊ,ШчЙћНјвЛВНМЦЫуВЛашвЊетаЉЪєад,дђбЁдё'attr_forget'жЕ
union_adjacent_contours_xld (SelectedContours, UnionContours, 2, 1, 'attr_keep')
*НЋUnionContoursТжРЊФтКЯГЩЮЊвЛИіЗТЩфОиаЮТжРЊ
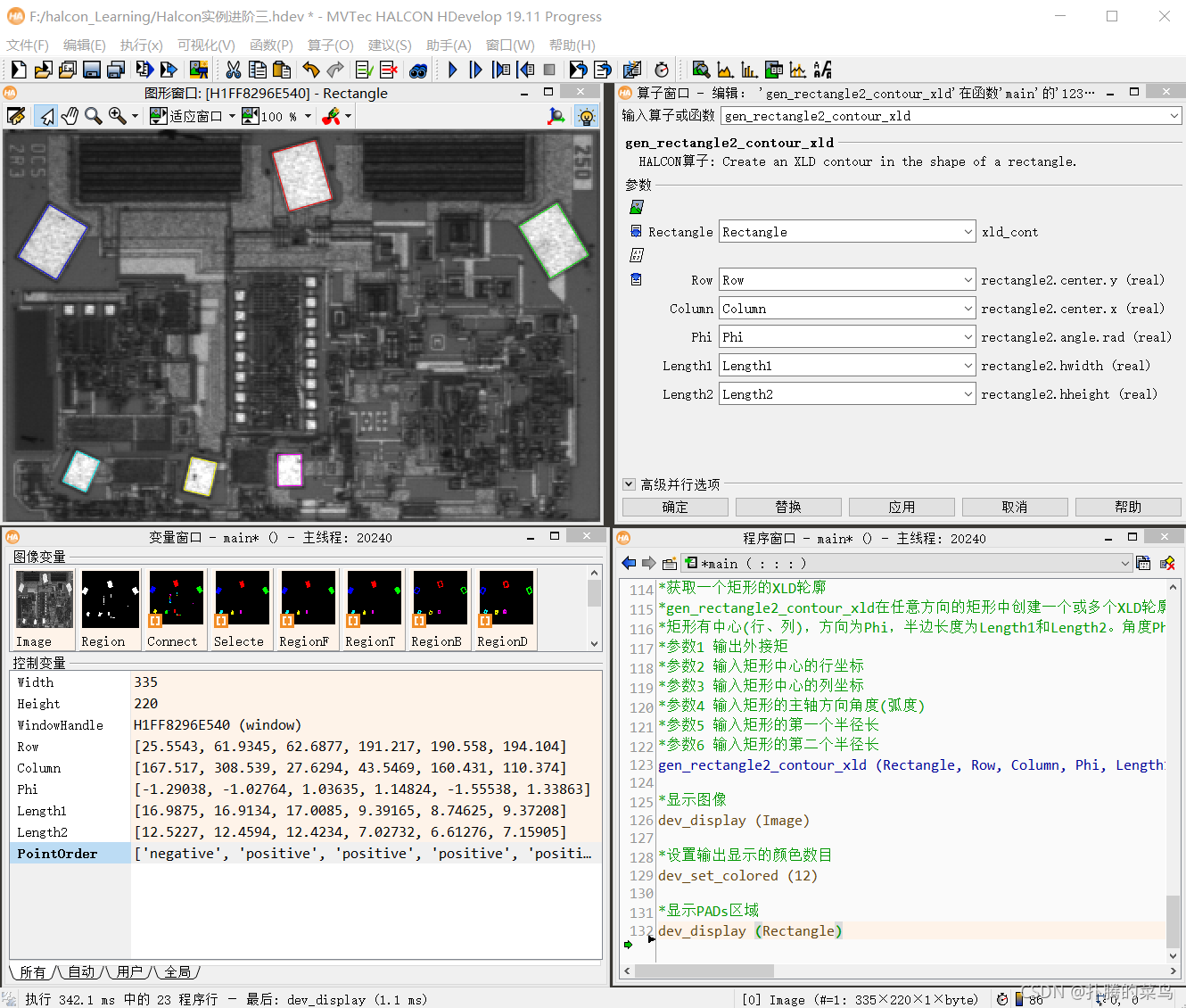
*fit_rectangle2_contour_xldНЋОиаЮгыcontoursИјГіЕФОиаЮXLDТжРЊНјааЦЅХф,ВЂдкRowЁЂColumn(center)ЁЂPhi (orientation)вдМАLength1КЭLength2 (вЛАыГЄЖШ)жаЗЕЛиОиаЮЕФВЮЪ§ЁЃНЧЖШPhiвдЛЁЖШЗЕЛи,ВЂжИЖЈЫЎЦНжсгыАыГЄЮЊLength1ЕФБпдкЪ§бЇЩЯе§ЗНЯђ(ФцЪБеыЗНЯђ)жЎМфЕФНЧЖШЁЃ
*ДЫЭт,дкPointOrderжаЗЕЛиТжРЊЕФЕуЫГађЁЃPointOrder = 'positive'БэЪОЕШИпЯпбиЪ§бЇЩЯЕФе§ЗНЯђ(ФцЪБеыЗНЯђ)ДЉЙ§ЁЃ
*ОиаЮФтКЯЫљгУЕФЫуЗЈПЩЭЈЙ§ЫуЗЈбЁдё:
*'regression' БъзМзюаЁЖўГЫжБЯпФтКЯ
*'huber' МгШЈзюаЁЖўГЫжБЯпФтКЯ,дкHuberЗНЗЈЕФЛљДЁЩЯМѕЩйСЫРыШКжЕЕФгАЯь
*'tukey' МгШЈзюаЁЖўГЫжБЯпФтКЯ,ЦфжаЛљгкTukeyЗНЗЈКіТдРыШКжЕ
*ВЮЪ§1 ЪфШыТжРЊ
*ВЮЪ§2 ОиаЮФтКЯЫуЗЈ
*ВЮЪ§3 гУгкМЦЫуЕФзюДѓЕШИпЯпЕуЪ§(ЫљгаЕуЪ§ЮЊ-1) ФЌШЯжЕ:-1
*ВЮЪ§4 БЛШЯЮЊЪЧБеКЯЕФТжРЊЖЫЕужЎМфЕФзюДѓОрРы ФЌШЯжЕ:0.0
*ВЮЪ§5 ЮЊСЫНјааФтКЯ,дкТжРЊЕФПЊЪМКЭНсЪјДІашвЊКіТдЕФЕуЕФЪ§ФП ФЌШЯжЕ:0
*ВЮЪ§6 зюДѓЕќДњДЮЪ§ ФЌШЯжЕ:3
*ВЮЪ§7 гУгкЯћГ§вьГЃжЕЕФМьВтвђзг ФЌШЯжЕ:2.0
*ВЮЪ§8 ЗЕЛиОиаЮжааФЕФаазјБъ
*ВЮЪ§9 ЗЕЛиОиаЮжааФЕФСазјБъ
*ВЮЪ§10 ЗЕЛиОиаЮЕФжїжсЗНЯђЕФНЧЖШ(ЛЁЖШ)
*ВЮЪ§11 ОиаЮЕФЕквЛИіАыОЖ(АыГЄ)
*ВЮЪ§12 ОиаЮЕФЕкЖўИіАыОЖ(АыПэ)
*ВЮЪ§13 ЗЕЛиИпЕШЯпЕФЕуНз
fit_rectangle2_contour_xld (UnionContours, 'tukey', -1, 0, 0, 3, 2, Row, Column, Phi, Length1, Length2, PointOrder)
*ЛёШЁвЛИіОиаЮЕФXLDТжРЊ
*gen_rectangle2_contour_xldдкШЮвтЗНЯђЕФОиаЮжаДДНЈвЛИіЛђЖрИіXLDТжРЊ
*ОиаЮгажааФ(ааЁЂСа),ЗНЯђЮЊPhi,АыБпГЄЖШЮЊLength1КЭLength2ЁЃНЧЖШPhiБиаывдЛЁЖШЮЊЕЅЮЛИјГі,ВЂжИЖЈКсжсгыАыГЄЮЊLength1ЕФБпдкЪ§бЇЩЯе§ЗНЯђ(ФцЪБеыЗНЯђ)ЕФМаНЧЁЃЭЈЙ§ДЋЕнвЛИігЩОиаЮВЮЪ§зщГЩЕФдЊзщ,ПЩвдДДНЈЖрИіXLDТжРЊ
*ВЮЪ§1 ЪфГіЭтНгОи
*ВЮЪ§2 ЪфШыОиаЮжааФЕФаазјБъ
*ВЮЪ§3 ЪфШыОиаЮжааФЕФСазјБъ
*ВЮЪ§4 ЪфШыОиаЮЕФжїжсЗНЯђНЧЖШ(ЛЁЖШ)
*ВЮЪ§5 ЪфШыОиаЮЕФЕквЛИіАыОЖГЄ
*ВЮЪ§6 ЪфШыОиаЮЕФЕкЖўИіАыОЖГЄ
gen_rectangle2_contour_xld (Rectangle, Row, Column, Phi, Length1, Length2)
*ЯдЪОЭМЯё
dev_display (Image)
*ЩшжУЪфГіЯдЪОЕФбеЩЋЪ§ФП
dev_set_colored (12)
*ЯдЪОPADsЧјгђ
dev_display (Rectangle)
????????ИНМг:
????????ЂйЁЂunion_adjacent_contours_xldЫузгЕФМЦЫуСїГЬ:
????????дкДЫЯъЯИЫЕУївЛЯТВЮЪ§3(MaxDistAbs)КЭВЮЪ§4(MaxDistRel)ЕФМЦЫуЗНЪН:
????????ВЮЪ§3->ЕШИпЯпЖЫЕуЕФзюДѓОрРы
????????ЖЈвхСНИіТжРЊжЎМфПЩНгЪмЕФзюДѓОјЖдОрРыЁЃОрРыбиВЮПМЕШИпЯпЕФЛиЙщЯпВтСПЁЃвђДЫ,ЫќЪЧСНЬѕЕШжЕЯпжЎМфЕФМфЯЖЭЖгАЕНВЮПМЕШжЕЯпЛиЙщЯпЩЯЕФГЄЖШ
????????ВЮЪ§4->ЕШИпЯпЖЫЕуЯрЖдНЯГЄЕФЕШИпЯпГЄЖШЕФзюДѓОрРы
????????ЖЈвхСЫСНИіТжРЊжЎМфПЩНгЪмЕФзюДѓЯрЖдОрРыЁЃЯрЖдОрРыЕФМЦЫуЗНЗЈЪЧНЋОрРыa(МћВЮЪ§MaxDistAbsЕФУшЪі)Г§вдВЮПМТжРЊЯпЕФГЄЖШb


????????ЂкЁЂfit_rectangle2_contour_xldЫузгЕФМЦЫуСїГЬ:
????????ЖдгІДњТыРяУцЕФзЂЪЭЯъНт
????????ЖдгкВЮЪ§2 Algorithm =ЁАhuberЁБКЭЁАtukeyЁБ,вЛИіЮШНЁЕФЮѓВюЭГМЦгУРДЙРМЦТжРЊЕуОрРыОиаЮЕФНќЫЦБпЕФБъзМВю,ЖјКіТдвьГЃжЕЁЃЖдОиаЮЕФУПЬѕБпЗжБ№МЦЫуБъзМВю,вдБуДІРэСНБпВЛЭъШЋДЙжБЕФОиаЮЁЃВЮЪ§7 ClippingFactor(ЯрЖдгкБъзМЦЋВюЕФЫѕЗХвђзг)ПижЦРыШКжЕЕФЪ§СП:бЁдёClippingFactorЕФжЕдНаЁ,МьВтЕНЕФРыШКжЕОЭдНЖрЁЃЖдвьГЃжЕНјааЕќДњМьВтЁЃВЮЪ§6 IterationsжИЖЈЕќДњЕФДЮЪ§ЁЃЖдгкAlgorithm = ЁЎregressionЁЏ,КѓСНИіВЮЪ§ЕФжЕНЋБЛКіТдЁЃзЂвт,дкtukeyЗНЗЈжа,РыШКжЕдкжДааНќЫЦжЎЧАБЛвЦГ§,ЫљгаЦфЫћЕуЖМБЛМгШЈ,ЖјдкhuberЗНЗЈжа,РыШКжЕШдШЛгаКмаЁЕФгАЯьЁЃЬиБ№Еи,ЖдгкРыШКЕу,гХЛЏЪмЕНЯпадгАЯь,ЖјЖдгкОрРыНЯаЁЕФЕу,гХЛЏЪмЕНЖўДЮгАЯьЁЃЖдгкДњЪ§ЗНЗЈ,ЫљгаЕуЕФОрРыЖдгХЛЏгаЖўДЮгАЯь,вђДЫЖдвьГЃжЕВЛОпгаТГАєадЁЃдкЪЕМљжа,ЭЦМіВЩгУtukeyЗНЗЈ
????????ЮЊСЫМѕЩйМЦЫуИККЩ,ПЩвдНЋОиаЮЕФФтКЯЯожЦдкТжРЊЕуЕФвЛИізгМЏФк:ШчЙћИјВЮЪ§3 MaxNumPointsИГжЕВЛЪЧ-1,дђжЛЪЙгУОљдШЗжВМдкТжРЊЩЯЕФMaxNumPoints
????????ИљОнгУгкДДНЈТжРЊЕФДІРэ,ТжРЊЕФЦ№ЪМЕуКЭНсЪјЕуПЩФмАќКЌЮЛжУЮѓВюЁЃвђДЫ,ПЩвдДгОиаЮФтКЯжаХХГ§ТжРЊПЊЪМКЭНсЪјДІЕФВЮЪ§5 ClippingEndPointsЕу
????????ЕБЕШжЕЯпЕФЦ№ЪМЕуКЭНсЪјЕужЎМфЕФОрРы<= ВЮЪ§4 MaxClosureDistЪБ,ЮвУЧШЯЮЊЕШжЕЯпЪЧБеКЯЕФЁЃЖдгкБеКЯТжРЊ,ВЛЪЙгУТжРЊЕФЖЫЕуНјааОиаЮФтКЯ,вђЮЊЫќНЋЛёЕУФтКЯжаЪЃгрЕуЕФСНБЖШЈжи
????????ОиаЮгыТжРЊЕФФтКЯЪЧЛљгкбАевТжРЊЕугыОиаЮЫФЬѕБпжЎМфЕФЖдгІЙиЯЕЁЃЮЊСЫЪЙФтКЯГЩЙІ,БиаыжСЩйгавЛИіЕуЮЛгкДњБэИїздОиаЮБпЕФЯпЖЮФкВП,вВОЭЪЧЫЕ,етИіЕуВЛФмЮЛгкЯпЖЮЕФЖЫЕуЁЃвђДЫ,жСЩйашвЊ8ИіЕШИпЯпЕуВХФмЗћКЯОиаЮЁЃвЛИіЕуБЛФкВПЗжХфЕНгыЫќгазюаЁОрРыЕФОиаЮБпЁЃЮЊДЫ,дкФкВПЪЙгУЕБЧАзюгХЕФОиаЮВЮЪ§,МДЕБЧАЕќДњВНжшЪЙгУЕФВЮЪ§ЁЃШчЙћдкОиаЮЕФжСЩйвЛВрУЛгаевЕНЖдгІЕФЕу,дђВЛФмЮЈвЛЕиШЗЖЈОиаЮВЮЪ§ЁЃдкБОР§жа,ЗЕЛиДэЮѓ3266ЁЃвђДЫ,fit_rectangle2_contour_xldЕФЕїгУепБиаыШЗБЃЪфШыЕФТжРЊгыОиаЮзуЙЛЯрЫЦЁЃЬиБ№ЪЧ,ШчЙћЕШИпЯпБЛЫФЬѕЯпНќЫЦ,ЕШИпЯпЕФФкНЧВЛФмаЁгк45ЖШ,вВВЛФмДѓгк135ЖШЁЃгЩгкТжРЊЕуБЛЗжХфЕНОиаЮЕФзюНќБп,етНЋвтЮЖзХОиаЮЕФжСЩйвЛВрНЋУЛгаЯргІЕФЕуЁЃДЫЭт,ClippingFactorВЛФмбЁЕУЬЋаЁ,вдУтЙТСЂЕувжжЦВњЩњУЛгаЯргІТжРЊЕуЕФОиаЮБпЁЃетжЛЛсЗЂЩњдкAlgorithm = ЁЎtukeyЁЏЁЃШчЙћТњзуЩЯЪіЬѕМў,fit_rectangle2_contour_xldНЋЗЕЛиИпЖШОЋШЗЕФОиаЮВЮЪ§ЁЃШчЙћЪЙгУTukeyЕФРыШКЕувжжЦЗНЗЈ,дђПЩвдЪЙгУfit_rectangle2_contour_xldЖдОиаЮНјааЮШНЁФтКЯ,ШчдВНЧОиаЮТжРЊЁЃ
????аЇЙћеЙЪО: